본 발명은 효율적이면서 높은 정밀도로 부품인식/부품탑재를 수행할 수 있는 전자부품 실장장치 및 전자부품 실장방법을 제공한다. 전자부품을 회로기판에 대한 탑재각도가 큰 순서대로 소트하여 전자부품의 흡착순서를 결정하는 동시에, 각 전자부품을 흡착한 후에 회전시키는 양을 각각 결정한다. 이 회전량은, 모든 전자부품을 순차적으로 흡착·회전한 결과, 모든 전자부품의 흡착자세가 각각의 탑재자세가 되도록 결정한다. 그리고 모든 전자부품을 흡착한 후, 흡착노즐에 흡착된 탑재자세의 전자부품을 순차적으로 비전 인식하고, 그 인식결과에 근거하여, 회로기판 위의 소정의 탑재위치에 전자부품을 순차적으로 탑재한다.
배경 기술
종래의 전자부품 실장장치로서, X, Y, Z, θ축 방향의 동작이 가능한 복수의 흡착노즐을 구비한 탑재헤드를 이용하여, 한 번에 복수의 전자부품을 흡착 유지하여 각 전자부품을 기판상에 순차적으로 탑재하는 것이 있다. 이러한 전자부품 실장장치로서, 복수의 흡착노즐의 θ방향의 회전축을, 1개의 모터에 의해 동시에 회전 제어하는 것이 있다(일본특허공개공보 제2000-259250호 참조, 특허문헌 1). 그러나 이 경우, 1개의 θ회전축을 회전시키면 다른 θ회전축도 동시에 회전하기 때문에, 전자부품의 실장(實裝)동작시에 불필요한 θ회전이 발생한다. 이에, 전자부품의 흡착노즐에 의한 흡착각도 및 기판에 대한 탑재각도에 근거하여, 전자부품의 흡착순서 및 탑재순서를 결정함으로써, 전자부품을 흡착?탑재할 때의 여분의 회전 동작을 저감시키도록 하는 것이 있다(일본특허공개공보 제2009-188028호 참조, 특허문헌 2). 이 기술은 전자부품을 흡착각도가 큰 순서 또는 작은 순서대로 소트하여 각 전자부품의 흡착순서를 결정하고, 결정된 흡착순서가 최후의 전자부품의 흡착각도와 동일하거나 또는 가장 가까운 탑재각도로부터 탑재각도가 가까운 순서대로 전자부품을 소트하여 각 전자부품의 탑재순서를 결정하는 것이다. 여기서는, 각 전자부품을 상기 흡착순서로 흡착한 다음, 레이저 센서를 이용한 360° 동시 회전에 의한 부품인식을 수행하고, 그 후 상기 탑재순서로 전자부품을 순차적으로 탑재하고 있다.
발명의 내용
해결하려는 과제
그런데, 전자부품 실장장치에 있어서는, 전자부품을 흡착노즐에 의해 흡착한 후에 부품인식을 수행함으로써 전자부품의 흡착 위치 어긋남을 검출하고, 그 후에 흡착 위치 어긋남 분의 보정을 수행하여 기판상에 전자부품을 탑재할 필요가 있는데, 이때, 보다 양호한 정밀도로 부품을 탑재하기 위해서는, 부품인식시의 자세로부터, 가능한 한 θ방향을 이동하지 않은 채 탑재동작을 수행하는 것이 바람직하다. 그러나 상기 특허문헌 2에 기재된 종래 장치에 있어서는, 전자부품을 인식한 후, 부품을 탑재하기 전에 부품을 탑재자세로 하기 위한 θ회전이 필요하게 된다. 이 때문에, 보다 양호한 정밀도로 부품을 탑재할 수가 없다. 따라서 본 발명은, 효율적이면서 높은 정밀도로 부품인식·부품탑재를 수행할 수 있는 전자부품 실장장치 및 전자부품 실장방법을 제공하는 것을 과제로 한다.
과제의 해결 수단
상기 과제를 해결하기 위하여, 동일 모터에 의해 동일 방향으로 동시 회전하는 복수의 노즐 샤프트에 각각 장착된 흡착노즐에 의해 전자부품을 순차적으로 흡착하고, 기판상의 소정의 탑재위치에 해당 전자부품을 순차적으로 탑재하는 전자부품 실장장치로서, 상기 전자부품을 부품공급장치로부터 상기 흡착노즐에 의해 흡착한 초기 흡착 자세에서, 상기 기판에 대한 탑재자세로 하기 위해 최저한으로 필요한 필요회전각도가 큰 순서대로, 전자부품의 흡착순서를 결정하는 흡착순서 결정수단과, 상기 흡착순서 결정수단에서 결정한 흡착순서에 따라서 전자부품을 순차적으로 흡착하는 부품흡착수단과, 상기 흡착순서 결정수단에서 결정한 흡착순서에 따라 흡착해야 할 모든 전자부품을 순차적으로 흡착한 결과, 모든 전자부품의 흡착자세가 각각 상기 탑재자세가 되도록, 상기 부품흡착수단에 의해 전자부품을 흡착할 때마다 상기 노즐 샤프트를 회전시키는 부품회전수단과, 상기 부품흡착수단에 의해 흡착해야 할 전자부품을 모두 흡착한 후, 상기 흡착노즐에 흡착된 상기 탑재자세의 전자부품을 순차적으로 인식하는 부품인식수단과, 상기 부품인식수단에 의한 인식결과에 근거하여, 상기 탑재위치에 전자부품을 순차적으로 탑재하는 부품탑재수단을 구비하는 것을 특징으로 하고 있다.
이와 같이, 모든 전자부품의 흡착을 마쳤을 때, 모든 전자부품의 흡착자세가 기판에 대한 탑재자세가 되도록 하기 때문에, 불필요한 θ회전을 필요로 하는 일없이 부품인식을 수행할 수가 있다. 또한, 부품인식을 수행한 후에도, 불필요한 θ회전을 필요로 하는 일없이 그대로 부품탑재를 수행할 수가 있다. 따라서 부품탑재 시에는 부품인식결과에 근거하는 탑재위치의 보정만으로 부품탑재동작을 수행할 수가 있다. 또한, 상기 필요회전각도는, 흡착해야 할 모든 전자부품의 부품공급장치로부터의 공급각도가 동일할 때, 상기 전자부품의 탑재각도인 것을 특징으로 하고 있다. 이와 같이, 먼저 흡착한 전자부품의 회전량이 많은 것을 고려하여, 흡착순서를 탑재각도가 큰 순서대로 소트한 순서로 하기 때문에, 종합적인 회전량을 최소한으로 할 수가 있다.
상기 필요회전각도는, 흡착해야 할 모든 전자부품의 부품공급장치로부터의 공급각도가 각각 다를 때, 상기 전자부품의 탑재각도로부터 해당 전자부품의 공급각도를 뺀 각도인 것을 특징으로 하고 있다. 이로써, 부품공급각도가 주어져 있을 경우(0° 이외의 경우)에는, 그 부품공급각도를 고려하여 적절히 흡착순서를 결정할 수가 있다. 또한, 상기 흡착순서 결정수단은, 상기 전자부품의 흡착가능각도가 제한되어 있는 흡착노즐에 의해 흡착하는 전자부품을 최초로 흡착하도록, 상기 흡착순서를 결정하는 것을 특징으로 하고 있다. 이로써, 흡착가능각도가 정해져 있는 흡착노즐을 병용하는 경우에도, 흡착순서를 적절히 결정하여 부품흡착을 수행할 수가 있다.
더욱이 또한, 상기 부품회전수단은, 상기 흡착노즐에 의해 흡착한 전자부품의 흡착 후의 상기 노즐 샤프트의 회전각도를, 해당 전자부품의 필요회전각도로부터 직후에 흡착되는 전자부품의 흡착에서 탑재까지의 총 회전각도를 뺀 각도로 설정하는 것을 특징으로 하고 있다. 이로써, 부품흡착에서 부품인식 및 부품탑재에 이르기까지의 θ회전량을 최소로 할 수 있고, 모든 전자부품의 흡착을 마쳤을 때의 흡착자세를, 효율적으로 각각의 탑재자세로 할 수가 있다. 또한, 동일 모터에 의해 동일 방향으로 동시 회전되는 복수의 노즐 샤프트에 각각 장착된 흡착노즐에 의해 전자부품을 순차적으로 흡착하고, 기판상의 소정의 탑재위치에 해당 전자부품을 순차적으로 탑재하는 전자부품 실장방법으로서, 상기 전자부품을 부품공급장치로부터 상기 흡착노즐에 의해 흡착한 초기 흡착자세에서, 상기 기판에 대한 탑재자세로 하기 위해 최저한으로 필요한 필요회전각도가 큰 순서대로, 전자부품의 흡착순서를 결정하고, 결정한 흡착순서에 따라서 전자부품을 순차적으로 흡착할 때, 상기 흡착순서에 따라 흡착해야 할 모든 전자부품을 순차적으로 흡착한 결과, 모든 전자부품의 흡착자세가 각각 상기 탑재자세가 되도록, 각 전자부품을 흡착할 때마다 상기 노즐 샤프트를 회전시켜, 흡착해야 할 전자부품을 모두 흡착한 후, 상기 흡착노즐에 흡착된 상기 탑재자세의 전자부품을 순차적으로 인식하며, 그 인식 결과에 근거하여, 상기 탑재위치에 전자부품을 순차적으로 탑재하는 것을 특징으로 하고 있다. 이로써, 불필요한 θ회전을 필요로 하는 일없이, 양호한 정밀도로 부품인식동작 및 부품탑재동작을 수행할 수 있는 전자부품 실장방법으로 할 수가 있다.
발명의 효과
본 발명에 따르면, 동시 회전하는 복수의 흡착노즐에 의해 전자부품을 순차적으로 흡착한 다음 부품인식을 수행하고, 그 후 순차적으로 기판에 탑재할 경우, 모든 전자부품의 흡착을 마쳤을 때, 모든 전자부품의 흡착자세가 기판에 대한 탑재자세가 되도록 흡착순서 및 흡착 후의 흡착노즐의 회전량을 결정한다. 이 때문에, 양호한 정밀도로 부품인식동작 및 부품탑재동작을 수행할 수가 있다. 또한, 여분의 회전동작을 저감시킬 수 있으므로, 전자부품이나 회전 구동원인 모터의 부하를 경감시킬 수가 있다.
발명을 실시하기 위한 구체적인 내용
이하, 본 발명의 실시형태를 도면에 근거하여 설명한다.
(제 1 실시형태)
(구성)
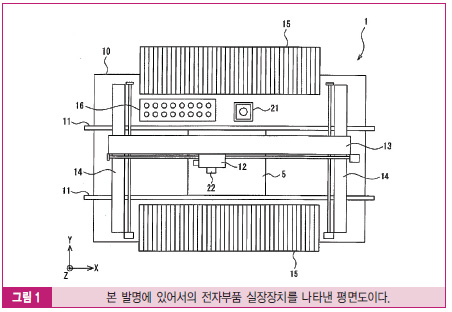
그림 1은 본 발명에 있어서의 전자부품 실장장치를 나타낸 평면도이다. 도면에서 부호 1은 전자부품 실장장치이다. 이 전자부품 실장장치(1)는, 기대(基臺 : 10)의 상면에 X방향으로 연장되는 한 쌍의 반송 레일(11)을 구비한다. 이 반송 레일(11)은, 회로기판(5)의 양측변부를 지지하고, 반송용 모터(도시 생략)에 의해 구동됨으로써 회로기판(5)을 X방향으로 반송한다. 또한, 전자부품 실장장치(1)는 탑재헤드(12)를 구비한다. 이 탑재헤드(12)는, 하부에 전자부품을 흡착하는 복수의 흡착노즐을 구비하고, X축 갠트리(13) 및 Y축 갠트리(14)에 의해, 기대(10) 위를 XY방향으로 수평이동 할 수 있도록 구성되어 있다.
상기 전자부품 실장장치(1)에는, 반송 레일(11)의 Y방향 양측에, 테이프 피더 등에 의해 전자부품을 공급하는 전자부품 공급장치(15)가 장착된다. 그리고 전자부품 공급장치(15)로부터 공급된 전자부품은, 탑재헤드(12)의 흡착노즐에 의해 진공 흡착되고, 회로기판(5) 상에 실장되어 탑재된다. 또한, 부품공급장치(15)와 회로기판(5) 사이에는, CCD 카메라로 이루어지는 인식 카메라(21)를 배치한다. 이 인식 카메라(21)는, 전자부품의 흡착위치 어긋남(흡착노즐의 중심위치와 흡착한 부품의 중심위치 간의 어긋남)이나, 흡착각도 어긋남(경사)을 검출하기 위해, 흡착노즐에 의해 흡착된 전자부품을 촬상(撮像)하는 것이다.
또한, 탑재헤드(12)에는, 거리센서(22)가 부착되어 있다. 이 거리센서(22)는, 센서 광에 의해 흡착노즐과 회로기판(5)의 Z방향의 거리(높이)를 측정한다. 또한, 전자부품 실장장치(1)에는, 흡착하는 부품의 사이즈나 형상에 따라, 흡착노즐을 교환하기 위한 노즐 교환기(16)가 설치되어 있다. 이 노즐 교환기(16) 내에는 복수 종류의 노즐이 보관, 관리되어 있다.
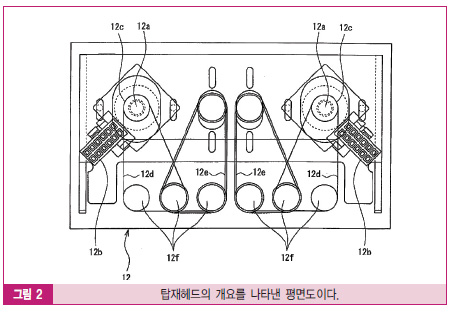
그림 2는 탑재헤드(12)의 개요를 나타낸 평면도이다. 그림 2에 나타낸 바와 같이, 탑재헤드(12)는, 베이스 부분이 지지부재(12b)에 고정된 복수(여기서는 2개)의 모터(12a)를 구비한다. 각 모터(12a)를 구동하면, 모터(12a)마다 회전되는 풀리(12c)에 의해 타이밍 벨트(12d)를 통해 2개의 회전축(노즐 샤프트 ; 12f)이 동시 회전하는 동시에, 중앙의 회전축(12f)에 고정되어 있는 동축 풀리에 의해 회전되는 타이밍 벨트(12e)를 통해, 3개째의 회전축(12f)도 동시 회전하게 되어 있다. 즉, 3개의 회전축(12f)을 1조(組)로 하여 동일 조에 속하는 3개의 회전축(12f)이, 각각 1개의 모터(12a)에 의해 동일 방향으로 동시 회전할 수 있게 되어 있다. 각 회전축(12f)의 하단부에는 각각 도시되지 않은 흡착노즐이 장착되어 있어 전자부품을 흡착할 수 있게 되어 있다.
본 실시형태에서는, 동시 회전 가능한 1조 3개의 회전축(12f)에 각각 장착되어 있는 흡착노즐에 의해, 3종류의 전자부품(A, B, C)을 소정의 흡착순서로 순차적으로 흡착한다. 이때, 전자부품(A/C)의 흡착을 모두 완료한 시점에서, 전자부품(A/C)의 흡착자세가 각각의 회로기판(5)에 대한 탑재자세가 되어 있도록 각 전자부품을 흡착할 때마다 소정의 회전량만큼 회전축(12f)을 동시 회전시킨다. 그리고 각각의 탑재자세로 되어 있는 전자부품(A/C)에 대하여, 인식 카메라(21)에 의한 비전 인식을 순차적으로 수행한 후, 인식결과에 근거하는 탑재위치의 보정을 수행하는 것만으로 전자부품(A/C)을 순차적으로 탑재한다.
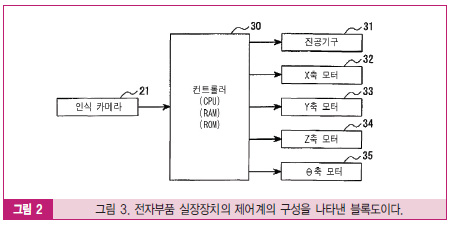
그림 3은 전자부품 실장장치(1)의 제어계의 구성을 나타낸 블록도이다. 전자부품 실장장치(1)는, 장치전체를 제어하는 CPU, RAM 및 ROM 등을 구비하는 마이크로컴퓨터로 이루어지는 컨트롤러(30)를 구비한다. 컨트롤러(30)는 이하에 나타내는 각 구성(31~35)을 각각 제어한다. 진공기구(31)는 진공을 발생시키며, 도시되지 않은 진공 스위치(vacuum switch)를 통해 각 흡착노즐에 진공의 음압(負壓)을 발생시키는 것이다. X축 모터(32)는 탑재헤드(12)를 X축 갠트리(13)를 따라 X축 방향으로 이동시키기 위한 구동원이며, Y축 모터(33)는 X축 갠트리(13)를 Y축 갠트리(14)를 따라 Y축 방향으로 이동시키기 위한 구동원이다. 컨트롤러(30)가 X축 모터(32) 및 Y축 모터(33)를 구동 제어함으로써, 탑재헤드(12)는 XY방향으로 이동할 수 있게 된다. Z축 모터(34)는 각 흡착노즐을 Z방향으로 승강시키기 위한 구동원이다. 한편, 여기서는 Z축 모터(34)가 1개만 도시되어 있지만, 실제로는 흡착노즐의 수만큼 설치된다. θ축 모터(35)는, 상기 1조의 흡착노즐을, 각 회전축(12f)을 중심으로 하여 동시 회전시키기 위한 구동원이며, 상술한 모터(12a)에 상당한다.
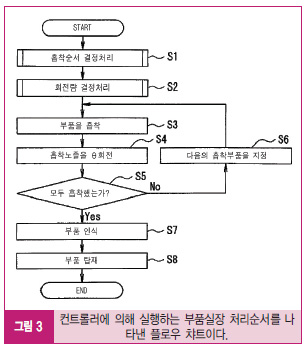
또한, 컨트롤러(30)는 그림 4에 나타낸 부품실장처리를 실행하며, 전자부품의 흡착동작 및 탑재동작을 수행한다. 이러한 부품실장처리는, 탑재헤드(12)의 1조의 흡착노즐을 이용하여 흡착·탑재하는 전자부품의 조마다 실행된다. 우선, 단계 S1에서 컨트롤러(30)는 흡착노즐에 의한 전자부품의 흡착순서를 결정하는 흡착순서 결정처리를 실시한다.
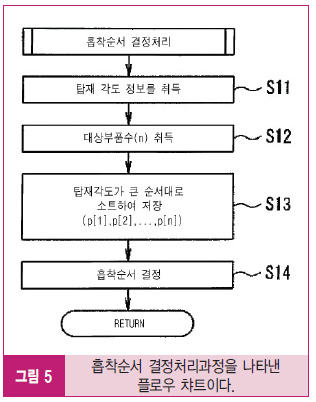
그림 5는, 단계 S1에서 실시하는 흡착순서 결정처리과정을 나타낸 플로우 챠트이다. 단계 S11에서 컨트롤러(30)는 실장처리대상이 되어 있는 전자부품의 회로기판(5) 상에 대한 탑재각도를 각각 취득하여, 단계 S12로 이행한다. 단계 S12에서 컨트롤러(30)는 실장처리대상인 전자부품의 수인 대상 부품 수(n)를 취득한다. 본 실시형태에서는, 3개의 흡착노즐이 1조로 되어 있기 때문에, 대상 부품 수(n)는 최대 3이 된다.
다음으로 단계 S13에서 컨트롤러(30)는, 상기 단계 S11에서 취득한 각 탑재각도를 큰 순서대로 소트하여, p[1], p[2], …, p[n]으로서 저장한다. 그리고 단계 S14에서, 컨트롤러(30)는 상기 단계 S13의 소트 결과에 근거하여 흡착순서를 결정하고, 흡착순서 결정처리를 종료한다. 여기서는, 흡착순서를, 탑재각도가 큰 순서대로, 탑재각도 p[1]의 전자부품 → 탑재각도 p[2]의 전자부품 → … → 탑재각도 p[n]의 전자부품의 순으로 한다. 즉, 전자부품을 부품공급장치(15)로부터 흡착노즐에 의해 흡착한 초기흡착자세에서, 회로기판(5)에 대한 탑재자세로 하기 위해 최저한으로 필요한 회전각도가 큰 순서대로, 전자부품의 흡착순서를 결정한다.
그림 4로 복귀하여, 단계 S2에서 컨트롤러(30)는, 부품흡착 후의 흡착노즐의 회전량을 결정하는 회전량 결정처리를 실시한다.
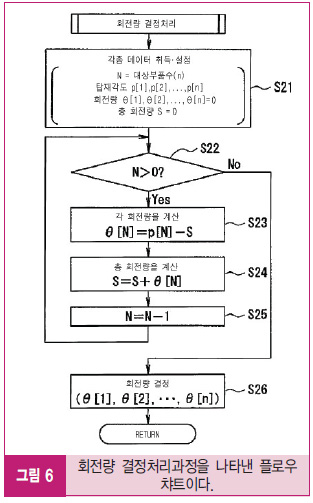
그림 6은 단계 S2에서 실시하는 회전량 결정처리과정을 나타낸 플로우 챠트이다. 단계 S21에서, 컨트롤러(30)는 각종 데이터의 취득 및 초기 설정을 수행한다. 여기서는 상기 단계 S1에서 결정한 대상 부품 수(n)와, 탑재각도(p[1], p[2], …, p[n])를 취득하는 동시에, 카운트 값(N)을 초기 값인 대상 부품 수(n)로 설정하며, 각 전자부품의 흡착 후의 회전량(θ[1],θ[2],…,θ[n]) 및 전자부품의 총 회전량(S)을 각각 초기 값인 0으로 설정한다. 여기서, 회전량 θ[m] (m=1,2,…n)은, 탑재각도 p[m]의 전자부품의 흡착 후의 회전량이다.
다음으로 단계 S22에서 컨트롤러(30)는, N > 0인지 여부를 판정하고, N > 0인 경우에는 단계 S23으로 이행하며, N ≤ 0인 경우에는 후술하는 단계 S26으로 이행한다. 단계 S23에서 컨트롤러(30)는, 탑재각도(p[N])와 이 시점에서의 총 회전량(S)에 근거하여, 다음 식을 바탕으로 회전량(θ[N])을 산출하고, 단계 S24로 이행한다.
θ[N] = p[N]-S ----식(1)
단계 S24에서 컨트롤러(30)는, 다음 식을 바탕으로 총 회전량(S)을 갱신하고, 단계 S25로 이행한다.
S = S+θ[N] ----식(2)
단계 S25에서 컨트롤러(30)는, 카운트 값(N)을 디크리먼트(decrement)하고 상기 단계 S22로 이행한다. 즉, 탑재각도 p[m]의 전자부품의 흡착 후의 회전량(θ[m])은, 해당 전자부품의 탑재각도(p[m])로부터, 해당 전자부품의 직후에 흡착되는 전자부품의 부품흡착에서 부품탑재까지의 총 회전량(S)을 뺀 값이 된다. 그리고 단계 S26에서 컨트롤러(30)는, 상기 단계 S23에서 결정된 각 부품의 회전량(θ[1], θ[2],…,θ[n])을 저장하고, 회전량 결정처리를 종료한다.
그림 4로 복귀하여 단계 S3에서 컨트롤러(30)는, 진공기구(31), X축 모터(32), Y축 모터(33) 및 Z축 모터(34)를 구동제어하여, 흡착 지정되어 있는 전자부품을 부품공급장치(15)의 소정의 부품공급위치로부터 흡착하고, 단계 S4로 이행한다. 한편, 초기상태에서는, 상기 단계 S1에서 결정한 흡착순서가 가장 빠른 전자부품이 흡착 지정된다.
단계 S4에서 컨트롤러(30)는, θ축 모터(35)를 구동 제어하여, 흡착노즐을 상기 단계 S3에서 흡착한 부품에 대응하는 회전량(θ[m])만큼 회전시키고 단계 S5로 이행한다. 단계 S5에서 컨트롤러(30)는, 흡착노즐에 의해 동시 흡착해야 할 전자부품을 모두 흡착했는지 여부를 판정하고, 모든 전자부품을 흡착하고 있지 않은 경우에는 단계 S6으로 이행하여, 흡착하고 있지 않은 전자부품 중 가장 흡착순서가 빠른 전자부품을, 다음에 흡착할 전자부품으로서 지정하고 나서 상기 단계 S3으로 이행한다.
한편, 상기 단계 S5에서 모든 전자부품을 흡착한 것으로 판정했을 경우에는, 단계 S7로 이행하여 인식 카메라(21)에 의한 비전 인식을 수행한다. 여기서는, 인식 카메라(21)로 각 전자부품을 순차적으로 촬상하고, 각 촬상 화상을 처리함으로써 각 전자부품의 흡착 위치 어긋남을 검출한다. 그리고 검출한 흡착 위치 어긋남에 따라서 부품탑재시의 보정량을 결정한다.
다음으로 단계 S8에서 컨트롤러(30)는 상기 단계 S7의 비전 인식 결과에 근거하여 각 전자부품을 회로기판(5)에 순차적으로 탑재하고, 부품실장처리를 종료한다. 이때의 탑재순서는 미리 결정한 일정한 순서이어도 무방하며, 전자부품의 흡착순서이어도 무방하다.
한편, 그림 4의 단계 S1가 흡착순서 결정수단에 대응하고, 상기 모터(12a ; θ축 모터(35))와 단계 S2 및 S4가 부품회전수단에 대응하며, 상기 흡착노즐과 단계 S3이 부품흡착수단에 대응하고, 상기 인식 카메라(21)와 단계 S7이 부품인식수단에 대응하며, 단계 S8이 부품탑재수단에 대응하고 있다.
(동작)
다음으로, 본 실시형태의 동작에 대해 설명한다. 여기서는, 3종류의 전자부품(A, B, C)을 각각 이하의 탑재 각도로 탑재하는 경우에 대해 설명한다.
부품 A : 탑재각도 180°
부품 B : 탑재각도 0°
부품 C : 탑재각도 90°
우선, 컨트롤러(30)는 각 부품의 흡착순서를 결정한다(단계 S1). 여기서는 상기 탑재각도를 큰 순서대로 소트하고(단계 S13), 탑재각도가 큰 순서대로 흡착순서를 결정한다(단계 S14). 즉, 상기 예에서 흡착순서는 A→C→B가 되고, 탑재각도 p[1]=180, p[2]=90, p[3]=0이 된다. 다음으로, 컨트롤러(30)는 회전량 결정처리를 실시하여, 각 부품의 흡착 후의 회전량을 구한다(단계 S2). 한편, 흡착순서는 A→C→B이기 때문에, 부품(A)의 흡착 후의 회전량은 θ[1], 부품(B)의 흡착 후의 회전량은 θ[3], 부품(C)의 흡착 후의 회전량은 θ[2]이다.
초기 상태에서는 N = n = 3이기 때문에(단계 S21), 맨 먼저, 흡착순서가 가장 느린 부품(B)의 회전량(θ[3])을 구한다. θ[3]은, 부품(B)의 탑재각도(p[3]=0)와 총 회전량((S)=0(초기 값))에 근거하고, 상기 (1)식을 바탕으로 하여 산출한다(단계 S23). 즉, θ[3]=0이 된다. 그 다음에, N=2가 되어(단계 S25), 흡착순서가 2번째로 느린 부품(C)의 회전량(θ[2])을 구한다. θ[2]는, 부품(C)의 탑재각도(p[2]=90)와, 총 회전량((S)=0(=θ[3]))에 근거하여 상기 (1)식을 바탕으로 산출한다(단계 S23). 즉, θ[2]=90이 된다. 마지막으로, N=1이 되어(단계 S25), 흡착순서가 가장 빠른 부품(A)의 회전량(θ[1])을 구한다. θ[1]은, 부품(A)의 탑재각도(p[1]=180)와, 총 회전량((S)=90(=θ[3]+θ[2]))에 근거하여, 상기 (1)식을 바탕으로 산출한다(단계 S23). 즉, θ[1]=90이 된다.
비전 인식 직전에 있어서의 부품(A)의 총 회전량은 θ[1] + θ[2] + θ[3]이며, 부품(C)의 총 회전량은 θ[2]+θ[3], 부품(B)의 총 회전량은 θ[3]이다. 따라서 부품(A~C)을 흡착·회전한 후, 최종적으로 부품(A~C)이 각각의 탑재각도가 되기 위해서는, 이하의 식이 성립한다.
θ[1] + θ[2] + θ[3] = 180 ----식(3)
θ[2] + θ[3] = 90 ----식(4)
θ[3] = 0 ----식(5)
상기 식(3)~ (5)에 의해, θ[1] = 90, θ[2] = 90, θ[3] = 0이 구해진다. 이와 같이, 회전량 결정처리는, 상기 (3)~(5)식을 만족하는 회전량(θ[1]~θ[3])을 구하는 처리에 상당한다.
부품(A~C)의 흡착순서와 부품흡착 후의 각 회전량이 결정되면, 컨트롤러(30)는 전자부품의 흡착·회전동작을 수행한다.
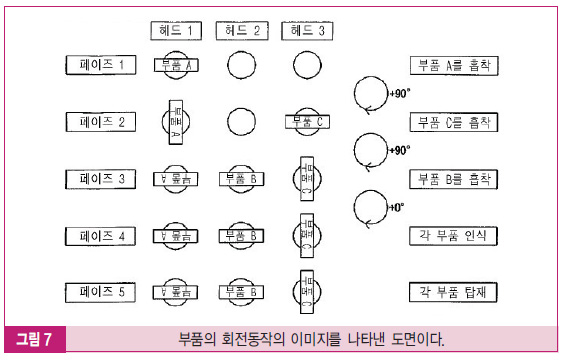
흡착순서는 A→C→B이기 때문에, 그림 7에 나타낸 바와 같이, 우선 페이즈 1에서 부품(A)을 흡착하고, 그 후, θ축 모터(35)를 구동 제어하여 흡착노즐(헤드(1~3))을 회전량(θ[1] = 90°) 회전시킨다. 그 다음에, 페이즈 2로 하여 부품(C)을 흡착하고, 그 후, θ축 모터(35)를 구동 제어하여 흡착노즐을 회전량(θ[2] = 90°) 회전시킨다. 그 다음에, 페이즈 3으로 하여 부품(B)을 흡착한다. 여기서, 회전량 θ[3]=0°이기 때문에, 부품(B)을 흡착한 후의 흡착노즐의 회전동작은 수행되지 않는다. 상기 동작을 수행함으로써, 모든 부품(A~C)이 각각의 탑재각도를 이룬 상태에서 흡착노즐에 흡착된 상태가 된다. 이와 같이, 결정된 흡착순서에 따라서 흡착해야 할 모든 전자부품을 순차적으로 흡착한 결과, 모든 전자부품의 흡착자세가 각각의 탑재자세가 되도록, 각 전자부품을 흡착할 때마다 탑재헤드(12)의 회전축(12f)을 회전시킨다. 이로써, 컨트롤러(30)는 페이즈 4로 하고, 이 흡착상태인 채로 불필요한 회전동작을 하는 일없이 각 부품의 비전 인식을 수행하며, 마지막으로 페이즈 5로 하여, 부품인식결과에 근거한 보정만으로 각 부품의 탑재동작을 수행할 수가 있다. 그런데, 일반적으로 전자부품 실장장치에서는, 전자부품을 흡착노즐에 의해 흡착한 후에 비전 인식에 의해 흡착자세의 센터링을 수행하고, 그 후에 센터링 결과분의 보정을 수행하여 전자부품을 기판 상에 탑재한다. 이때 보다 양호한 정밀도로 부품탑재를 수행하기 위해서는, 비전 인식시의 자세로부터, 불필요한 θ회전이동을 하지 않고서 부품탑재동작을 수행하는 것이 바람직하다. 그런데, θ축을 동시 회전하는 복수의 노즐 샤프트를 갖는 탑재헤드를 이용하여 전자부품을 순차적으로 흡착하고, 각 전자부품을 비전 인식한 후에 각 전자부품을 탑재할 경우, 각 전자부품의 탑재각도가 각각 다르면, 각 전자부품을 각각의 탑재각도로 탑재하기 위해서는 아무래도 비전 인식 후에 전자부품의 θ회전이 필요하게 된다. 예컨대, 2종류의 부품(A, B)을 비전 인식하여 탑재하는 동작은, 부품(A, B)을 순차적으로 흡착 → 노즐 샤프트를 부품(A)의 탑재각도로 회전 → 부품(A)를 비전 인식 → 부품(B)의 탑재각도로 회전 → 부품(B)을 비전인식 → 부품(A)의 탑재각도로 회전 → 부품(A)을 탑재 → 부품(B)의 탑재각도로 회전 → 부품(B)을 탑재가 된다. 이와 같이, 부품을 인식한 후에 불필요한 θ회전이 발생한다. 설령 탑재순서를 A, B 반대로 한다 하여도, 부품(A)을 탑재하기 위해서는 θ축을 회전시켜야만 하여 불필요한 θ회전을 배제할 수는 없다. 이에, 부품탑재시의 불필요한 θ회전을 배제하는 방법으로서, 각 부품에서 인식/탑재 동작을 일련으로 수행하는 것이 생각된다. 그러나 이 경우, 비전 인식을 수행하는 인식위치와 부품탑재위치 사이의 왕복이동동작이 늘어나기 때문에 효율이 불량하다.
이에 대하여 본 실시형태에서는, 최종적으로 모든 부품이 각각의 탑재자세가 되도록 각 부품을 흡착할 때마다 소정의 θ회전을 수행하기 때문에 모든 부품을 흡착한 후에는 불필요한 θ회전을 하지 않으며 부품인식 및 부품탑재를 수행할 수 있다. 따라서 고정밀도의 부품인식 및 부품탑재를 수행할 수가 있다. 또한, 소정의 인식위치에서 각 부품의 비전 인식을 순차적으로 수행한 후, 부품탑재위치로 이동하여 각 부품의 탑재를 수행하기 때문에, 인식위치와 부품탑재위치 사이의 불필요한 왕복이동동작을 배제할 수 있어 효율이 양호하다.
(효과)
이와 같이, 상기 실시형태에서는, 모든 전자부품을 순차적으로 흡착/회전한 결과, 모든 전자부품의 흡착자세가 각각의 탑재자세가 되도록 흡착순서 및 흡착 후의 회전량을 결정한다. 이 때문에, 모든 전자부품을 흡착한 후, 불필요한 θ회전을 필요로 하는 일없이 부품인식동작을 수행할 수가 있다. 또한, 부품인식을 수행한 후에도, 불필요한 θ회전을 필요로 하는 일없이, 부품인식결과에 근거한 탑재위치의 보정만으로 부품탑재동작을 수행할 수가 있다. 따라서 보다 양호한 정밀도로 부품인식동작 및 부품탑재동작을 수행할 수 있다. 더욱이, 여분의 회전동작을 저감시킬 수 있으므로, 전자부품이나 회전구동원인 모터의 부하를 경감시킬 수가 있다. 또한, 이때, 먼저 흡착한 전자부품일수록 흡착으로부터 탑재까지의 총 회전량이 많다는 점을 고려하여, 흡착 순서를 탑재각도가 큰 순서대로 소트한 순서로 하므로 종합적인 회전량을 최소한으로 할 수가 있다. 더욱이, 흡착노즐에서 흡착한 전자부품의 흡착 후의 회전량을, 해당 전자부품의 탑재각도로부터 직후에 흡착되는 전자부품의 흡착에서 탑재까지의 총 회전각도를 뺀 값으로 설정하므로, 모든 전자부품의 흡착을 마쳤을 때의 흡착자세를, 효율적으로 각각의 탑재자세로 할 수 있다.
(응용예)
한편, 상기 실시형태에 있어서는, 각 부품의 공급각도가 모두 0°인 경우에 대해 설명하였으나, 부품의 공급각도가 주어져 있을 경우(0° 이외의 경우)에는, 그 공급각도를 고려하여 흡착순서를 결정한다. 즉, 공급각도가 주어져 있는 부품에 있어서, 가상의 탑재각도 = (실제의 탑재각도 - 공급각도)를 설정하고, 가상의 탑재 각도를 이용하여 흡착순서를 결정한다. 이 가상의 탑재각도는, 전자부품을 부품공급장치(15)로부터 흡착노즐에 의해 흡착한 초기 흡착자세에서, 회로기판(5)에 대한 탑재자세로 하기 위해 최저한으로 필요한 필요회전각도이다.
이하, 구체예를 이용하여 설명한다.
여기서는, 3종류의 전자부품(A, B, C)을, 이하의 공급각도 및 탑재각도로 순차적으로 탑재하는 경우에 대해 설명한다.
부품 A : 공급각도 0°, 탑재각도 180°
부품 B : 공급각도 90°, 탑재각도 0°
부품 C : 공급각도 0°, 탑재각도 90°
이 경우, 부품(B)의 가상 탑재각도는 0°- 90°= -90°= 270°가 된다. 이 때문에, 흡착순서는 B→A→C가 된다. 또한, 부품(A~C)을 흡착/회전한 후, 최종적으로 부품(A~C)이 각각의 탑재각도가 되기 위해서는, 이하의 식이 성립하게 된다.
θ[1] + θ[2]+ θ[3] = 270 ----식(6)
θ[2] + θ[3] = 180 ----식(7)
θ[3] = 90 ----식(8)
상기 식(6)~(8)에 의해, θ[1]=90, θ[2]=90, θ[3]=90이 된다.
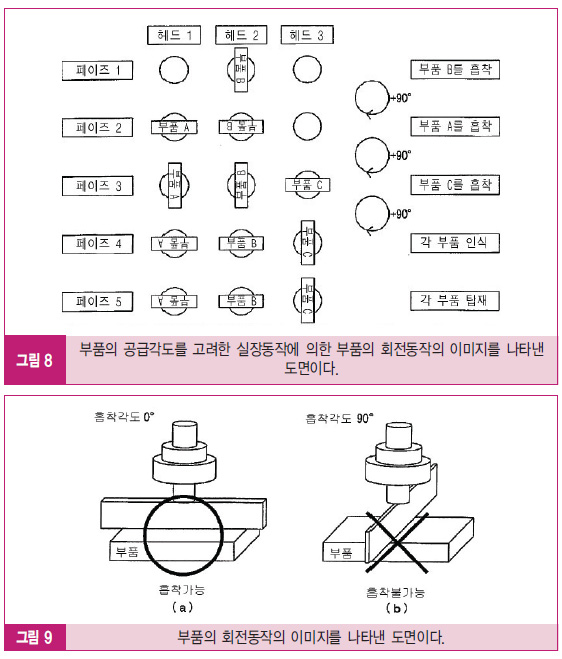
따라서 이 경우, 그림 8에 나타낸 바와 같이, 페이즈 1에서는 공급각도가 90°인 부품(B)을 흡착하고, 그 후 각 흡착노즐을 회전량(θ[1]=90°) 회전시킨다. 그 다음에, 페이즈 2로 하여 부품(A)을 흡착하고, 그 후, 각 흡착노즐을 회전량(θ [2]=90°) 회전시킨다. 그 다음에, 페이즈 3으로 하여 부품(C)을 흡착하고, 그 후, 각 흡착노즐을 회전량(θ[3]=90°) 회전시킨다. 이로써, 부품(A~C)은 각각 탑재각도를 이룬 상태가 된다. 이와 같이, 공급각도가 주어져 있을 경우(0°이외의 경우)에는, 그 공급각도를 고려하여 흡착순서를 결정하므로, 상술한 공급각도가 주어지지 않은 경우(0°인 경우)에서와 마찬가지로, 불필요한 θ회전을 필요로 하지 않으면서 양호한 정밀도로 부품인식동작 및 부품탑재동작을 수행할 수가 있다.
또한, 상기 실시형태에 있어서는, 흡착노즐로서, 전자부품을 어느 각도에서나 흡착할 수 있는 노즐을 이용하는 경우에 대해 설명하였으나, 그림 9에 나타낸 바와 같이, 흡착가능한 각도가 정해져 있는, 각도를 갖는 노즐(청소기 노즐, 그리퍼(gripper) 노즐, T형 노즐 등)을 이용할 경우에는, 이를 고려하여 흡착순서를 결정한다. 즉, 각도를 갖는 노즐을 이용하여 흡착하는 부품을 최초로 흡착하도록 흡착순서를 결정한다. 이하에서는 구체예를 이용하여 설명한다.
여기서는, 3종류의 전자부품(A, B, C)을 이하의 탑재각도로 순차적으로 탑재하는 경우에 대해 설명한다. 한편, 부품 B를, 각도를 갖는 노즐을 이용하여 흡착하는 부품으로 하고 공급각도는 모두 0°로 한다.
부품 A : 탑재각도 180°
부품 B : 탑재각도 0°(각도를 갖는 노즐)
부품 C : 탑재각도 90°
이 경우, 부품 B를 최초로 흡착하는 부품으로 하고 나머지 부품(A, C)의 흡착순서는 탑재각도가 큰 순서가 된다. 즉, 흡착순서는 B→A→C가 된다. 또한, 부품(A~C)을 흡착/회전한 후, 최종적으로 부품(A~C)이 각각의 탑재각도가 되기 위해서는, 이하의 식이 성립하게 된다.
θ[1] + θ[2] + θ[3] = 0 ----식(9)
θ[2] + θ[3] = 180 ----식(10)
θ[3] = 90 ----식(11)
상기 식(9)~ (11)에 의해, θ[1] = 180, θ[2] = 90, θ[3] = 90이 된다.

따라서, 이 경우, 그림 10에 나타낸 바와 같이, 페이즈 1에서는 부품(B)을 흡착하고, 그 후, 각 흡착노즐을 회전량(θ[1] = 180°) 회전시킨다. 그 다음에, 페이즈 2로 하여 부품(A)을 흡착하고, 그 후, 각 흡착노즐을 회전량(θ[2] = 90°) 회전시킨다. 다음으로, 페이즈 3으로 하여 부품(C)을 흡착하고, 그 후, 각 흡착노즐을 회전량(θ[3] = 90°) 회전시킨다. 이로써, 부품(A~C)은 각각 탑재각도를 이룬 상태가 된다. 이와 같이, 전자부품의 흡착가능각도가 제한되어 있는 흡착노즐을 사용할 경우에는, 이를 고려하여 흡착순서를 결정하므로, 상술한 흡착가능각도의 제한이 없는 흡착노즐을 사용하는 경우와 마찬가지로, 불필요한 θ회전을 필요로 하지 않으면서, 양호한 정밀도로 부품인식동작 및 부품탑재동작을 수행할 수가 있다. 더욱이, 상기 실시형태에 있어서는, 전자부품의 흡착 후의 회전속도의 차이에 따라서 흡착순서를 결정하도록해도 무방하다. 비교적 사이즈가 큰 부품이나 무거운 부품은, 흡착시의 회전동작에 의해 부품이 흡착노즐로부터 낙하하는 것을 방지하기 위해, 회전속도를 느리게 설정하는 경우가 있다.







