배경기술
픽 앤드 플레이스 머신(pick-&-place machine)은 전자 회로 기판을 제조하는 데 일반적으로 사용되고 있다. 픽 앤드 플레이스 머신에는 대개 빈 인쇄 회로 기판이 공급되며, 그러면 픽 앤드 플레이스 머신은 소자 피더(component feeder)로 부터 전자 소자를 집어서 그 소자를 기판 위에 배치한다. 소자들은 솔더 페이스트(solder paste)가 용융되거나 또는 접착제가 완전히 경화되는 후속 단계까지 솔더 페이스트 또는 접착제에 의하여 임시적으로 기판 위에 고정된다.
픽 앤드 플레이스 머신의 동작은 매력적이다. 픽 앤드 플레이스 머신의 속도가 쓰루풋(throughput)에 대응하기 때문에, 픽 앤드 플레이스 머신이 빨리 가동할수록 제조되는 기판의 가격은 저렴해진다. 또한, 배치 정밀도(placement accuracy)가 극히 중요하다. 칩 커패시터 및 칩레지스터와 같은 전자 소자들은 비교적 작으며, 동일하게 작은 배치 지점 위에 정밀하게 배치되어야 한다. 다른 소자들은 더 크다 하더라도 상대적으로 미세한 피치로 서로 일정 간격을 두고 배치되는 상당히 많은 수의 리드 또는 도체들을 구비한다. 각 리드가 적합한 패드 위에 배치되는 것을 보장하기 위해서는 그러한 소자들도 또한 정밀하게 배치되어야 한다. 그러므로 픽 앤드 플레이스 머신은 극히 빠르게 작동해야 할 뿐만 아니라, 소자들을 극히 정밀하게 배치하여야 한다.
기판 제조 품질을 향상시키기 위해서는, 부적절하게 배치되거나 누락된 소자 또는 발생 가능한 다양한 에러를 확인하기 위하여, 배치 작업 후에, 그리고 솔더 리플로우 공정 전과 후에, 완전히 또는 부분적으로 실장된 기판을 검사하는 것이 일반적이다. 그러한 작업을 수행하는 자동화 시스템은 솔더 리플로우 공정 전에 소자 배치 문제점을 확인하여, 리플로우 공정 후의 재작업 대상인 결함이 있는 기판들을 훨씬 용이하게 재작업 또는 확인할 수 있게 한다는 점에서 매우 유용하다. 그러한 시스템의 한 가지 예가 사이버옵틱스 코포레이션(CyberOptics Corporation)으로부터 입수 가능한 Model KS 200이라는 상표명으로 판매되고 있다. 이 시스템은 정렬 및 회전 에러, 누락 소자와 뒤집힌 소자, 빌보드(billboards), 툼스톤(tombstones), 소자 결함, 틀린 극성 및 잘못된 소자를 확인하는 데 사용될 수 있다. 리플로우 공정 전의 에러의 확인은 많은 장점을 제공한다. 재작업이 더 쉬워지고, 폐쇄 루프식 생산 관리가 용이하며, 에러 발생과 치유 사이에 공정 중 작업이 더 적게 존재한다. 그러한 시스템은 매우 유용한 검사 기능을 제공하지만, 프로그래밍 시간, 보수 유지 노력 등은 물론 설비 공간을 소비한다.
발명의 상세한 설명
본 발명의 실시예들은 픽 앤드 플레이스 머신에 의하여 수행되는 소자 수준 검사를 개선한다. 그러한 개선에는, 의도된 배치 지점의 스테레오비젼 촬상; 배치 노즐 근처의 제한된 공간에서의 비교적 고출력의 조명을 제공하는 것을 용이하게 하는 향상된 조명;영상 획득 장치(image acquisition device)가 소자 배치 지점의 평면에 대하여 일정 각도에서 배치 지점을 투시할 수 있도록 하여, 그 영상이 소자에 의하여 가려질 가능성을 감소시키는 광학장치; 소자 배치 전후의 영상 획득이 시스템 쓰루풋에 실질적으로 충격을 주지 않도록 상업적으로 입수 가능한 CCD 어레이로 영상을 신속하게 획득할 수 있는 기술; 그리고 소자 검사 및 검증 정보를 제공하는 영상 처리 기술이 포함된다. 본 발명의 전술한 장점 및 기타의 장점은 하기 설명으로부터 명백해질 것이다.
실시예
비록 본 발명의 실시예를 갠트리 스타일의 픽 앤드 플레이스 머신과 관련하여 설명하겠지만, 당업자라면 본 발명의 실시예가 다른 형태의 픽 앤드 플레이스 머신에도 적용 가능하다는 것을 인식할 것이다.
.jpg)
<그림 1. 본 발명의 실시예들이 수행될 수 있는 픽 앤드 플레이스 머신의 개략도이다.>
그림 1은 본 발명의 실시예들이 적용 가능한 예시적인 픽 앤드 플레이스 머신(201)의 개략도이다. 픽 앤드 플레이스 머신(201)은 이송 시스템 또는 컨베이어(202)를 거쳐 회로 기판(203)과 같은 공작물을 받는다. 그 후, 배치 헤드(206)가 소자 피더(component feeders)로부터 공작물(203)상에 실장될 하나 이상의 전자 소자를 픽업하고 x, y, z 방향으로 이동하여 그 소자를 공작물(203) 위의 적절한 지점에 적절한 방향으로 배치한다. 배치 헤드(206)는 그것이 소자를 픽업 지점으로부터 배치 지점으로 이동시킬 때 노즐(208, 210, 212)에 의하여 유지되는 소자들 아래로 통과할 수 있는 센서(200)를 포함한다. 센서(200)가 픽 앤드 플레이스 머신(201)이 노즐(208, 210, 212)에 의하여 유지되는 소자들의 하부를 투시할 수 있게 하며, 이에 따라 소자가 소자 픽업 지점으로부터 배치 지점으로 이동되고 있는 동안 소자의 방향 및 어느 정도까지의 소자의 검사가 수행될 수 있다. 다른 픽 앤드 플레이스 머신은 고정 카메라 위로 이동하여 소자를 촬상하는 배치 헤드를 이용할 수도 있다. 배치 헤드(206)는 또한 공작물(203)에 관한 배치 헤드(206)의 상대적인 위치가 쉽게 계산될 수 있도록 공작물(203)에 기준 마크를 배치하는 데 일반적으로 사용되는 하향 투시 카메라(209)를 포함할 수도 있다.
.jpg)
<그림 2. 본 발명의 실시예에 따른 스테레오비젼 영상 획득 시스템의 단순화된 개략도이다.>
그림 2는 본 발명의 실시예에 따른 배치 헤드의 개략도이다.
그림 2는 배치 지점(360) 위에 노즐(210)이 소자(304)를 부착하기 전에 소자(304)의 배치 지점(360)의 영상을 획득하기 위하여 배치된 한 쌍의 영상 획득 장치(300, 302)를 예시하고 있다. 영상 획득 장치(300, 302)는 소자(304)의 배치 전과 그 직후의 공작물(203) 위의 배치 지점(360)의 영상을 얻는다. 이들 배치 전 영상과 배치 후 영상의 비교는 소자 수준의 배치 검사 및 검증을 용이하게 한다. 배치 지점의 영상의 획득은 일반적으로 노즐(210)과 같은 노즐이 배치 지점 위에서 소자(304)를 유지할 때 이루어지기 때문에, 그 소자 자체 또는 이미 공작물 상에 실장되는 인접한 소자로부터의 간섭을 최소화 또는 감소시키면서 배치 지점(360)을 촬상할 수 있는 것이 중요하다. 그러므로 영상 획득 장치는 공작물(203)의 평면에 관하여 일정 각도(θ)로 경사져 있는 투시를 허용하는 광학축을 채용하는 것이 바람직하다. 영상 획득장치(300, 302)가 배치 지점(360)을 투시하는 각도(θ)를 보상하기 위하여, 이들 영상 획득 장치(300, 302)가 샤임플러그 조건(Scheimflug condition)을 이용하게 되어 있는 것이 바람직하다. 샤임플러그 조건을 채용될 수 있는 한 가지 특별한 방법은 각 영상 획득 장치(300, 302) 내의 면적 어레이 검출기(area array detector)가 개별적인 영상 획득 장치(300, 302)의 광학적 연결장치 축에 관하여 일정 각도로 배치되게 하는 것이다. 이러한 조건 하에서, 틸트된 피사체 평면(tilted object plane)(배치 지점)이 틸트된 영상 평면 상에 적절히 촬상된다.
그림 2에 도시되어 있는 바와 같이, 영상 획득 장치(300, 302)는 또한 이들 영상 획득 장치(300, 302)가 배치 지점(360)을 스테레오비젼 촬상을 하도록 z 축에 대하여 소정 각도(φ)만큼 각도상 간격을 두고 있는 것이 바람직하다. 그러한 스테레오비젼 촬상은 아래에서 보다 상세히 설명될 많은 장점을 제공한다. 배치 지점의 전후 조건의 스테레오비젼 촬상은 높이 맵(height maps)이 x-y 데이터로 발생될 수 있게 한다. 스테레오비젼 촬상의 두 가지 장점은 의도된 소자 배치 지점의 깊이 맵의 발생과, 소자 시야(component view)가 시선을 따라 배치된 다른 더 높은 소자에 의하여 막히게 될 가능성을 최소화하거나 적어도 감소시킬 수 있는 능력이다. 한 투시 지점에서 소자 시야가 막히게 되는 경우, 그 소자는 여전히 다른 카메라로 투시가 가능한 것이 일반적이다. 각 영상 획득 장치(300, 302)는 또한 비체계화된 조명장치(non-structured illuminator)(306)와 체계화된 조명 장치(structured illuminator)(308)를 포함하는 것이 바람직하다. 비체계화된 조명 장치(306)가 각 영상 획득 장치(300, 302)상에 배치되어 있는 것으로 도시되어 있으나, 일부의 실시예에서는 별도로 장착된 단일의 비체계화된 조명 장치를 마련하는 것도 가능할 수 있다.
그림 2에 예시된 시스템은 향상된 소자의 검사를 위하여 단독으로 또는 조합하여 사용될 수 있는 복수 개의 특징을 제공한다.
상기 시스템이 사용될 수 있는 한 가지 방법은 배치 지점(360)의 임의의 한 장면으로부터 높이를 재구성하기 위하여 체계화된 광을 사용하는 것이다. 다른 한 가지 방법은 체계화된 광을 조명 광원으로 사용하여 배치 지점(360)의 표면에 광 패턴을 제공한 후, 1982년 뉴욕 소재 아카데믹 프레스(Academic Press) 발행, 디지털 화상 처리(Digital picture processing)에서 로젠펠드, 에이.(Rosenfeld, A.) 및 에이. 씨. 칵(A. C. Kak)이 보고한 바와 같은 공지의 상관 관계 해석 알고리듬(correlation algorithms)을 사용하여 다른 장면 및 두 개의 스테레오비젼 영상으로부터 획득된 두 개의 영상 사이의 체계화된 조명을 상관시켜 배치 전 또는 후의 기판 표면의 높이의 맵을 계산하는 것이다.
여기에서 사용되는 체계화된 광이라 함은 광의 정현파형 패턴, 스폿 또는 모양의 규칙적인 배열, 랜덤 패턴, 그리고 심지어는 광의 의사 랜덤 패턴(pseudo-random patterns)을 포함한다. 경우에 따라, 영상 중 하나에 공작물 표면의 일부가 나타나지 않는 상황 및 노즐 구조가 있게 된다. 하나 이상의 영상으로부터 누락되기 쉬운 공작물의 표면 부분들을 투시하도록 추가적인 카메라를 배치할 수 있다. 대안으로, 배치 전후, 다른 장면으로부터의 누락 영상 부분을 함께 이어 맞춰서, 배치 품질에 관한 정보를 제공하는 데 필요한 영상, 또는 높이 정보를 제공하는 데 필요한 스테레오 정보를 획득하는 것이 가능하다.
.jpg) |
| <그림 3. 본 발명의 실시예에 따른 픽 앤드 플레이스 머신의 작동 방법을 설명하는 흐름도이다.> |
그림 3은 픽 앤드 플레이스 머신에서의 소자 수준 검사를 행하기 위하여 영상을 얻는 방법의 흐름도이다. 단계 350에서, 하나 이상의 비체계화된 조명 장치에 전원을 인가하여 소자 배치 전에 상기 의도된 배치 지점을 조명한다. 단계 352에서, 각 영상 획득장치(300, 302)는 배치 지점이 비체계화된 조명으로 조명되고 있는 동안 그 배치 지점의 배치 전 영상(pre-placement image)을 얻는다. 영상 획득 장치(300, 302)는 그들의 개별적인 영상을 동시에 또는 서로 실질적으로 동일한 시간에 얻는 것이 바람직하다.
여기에서 사용되는‘실질적으로 동일한 시간’이라 함은 영상 획득 사이에 물리적인 시스템이 인식할 수 있을 정도로 이동되지 않을 만큼 시간적으로 충분히 근접한 것을 의미한다. 그러므로 배치 전 스테레오비젼 영상의 획득은 단계 352에서 수행되고 비체계화된 조명 장치는 전원이 차단된다. 선택적으로, 의도된 소자 배치 지점에 대한 체계화된 조명의 배치 전 스테레오비젼 영상 또는 영상을 사전 배치 검사 작업에 이용할 수 있다. 그러한 작업은 솔더 페이스트가 관련 소자의 리드를 받아들일 적절한 위치에 부착되어 있다는 것, 아무런 부스러기 또는 기타의 바람직하지 못한 물질도 의도된 배치 지점에 존재하지 않는다는 것의 검증을 포함하며, 또한 바람직할 수도 있는 임의의 다른 검사 작업을 포함한다.
각 영상 획득 장치로부터 체계화된 조명 영상이 획득되어 상기 의도된 소자 배치 지점의 소자 배치 전의 3차원 영상 정보를 제공할 수 있다. 각 영상 획득 장치가 자체적인 체계화된 조명 장치를 사용하는 경우, 영상 획득 장치는 하나의 영상 획득 장치로부터의 체계화된 영상이 다른 영상 획득 장치의 체계화된 영상과 간섭하지 않도록 그들의 개별적인 영상을 순차적으로 획득해야 한다. 그러나 적절한 체계화된 조명 장치가 사용되어 각 조명 장치로부터의 체계화된 조명이 처리 시에 명확해질 수 있다면, 영상획득 장치는 각각 그것들의 개별적인 체계화된 조명 영상을 동시에 획득할 수 있다.
단계 354에서, 노즐(210)과 같은 노즐이 소자를 그것의 의도된 배치 지점에 배치한다. 단계 356에서, 영상 획득 장치(300,302)는 다시 배치 지점의 배치 후 스테레오비젼 영상을 얻는다.
선택적으로, 단계 358에서, 체계화된 조명 장치(308)에 전원이 인가되어 소자(304)가 그것의 의도된 배치 지점에 안착할 때 소자에 체계화된 조명을 제공할 수 있다. 영상 획득 장치(300,302)는 그 후에 상기 의도된 배치 지점이 체계화된 조명(단계 359)으로 조명되고 있는 동안 또 다른 한 세트의 스테레오비젼 영상을 선택적으로 얻을 수 있다. 선택적인 단계 358 및 359는 상기 의도된 배치 지점의 배치 후 3차원 기준점 영상의 발생을 촉진한다.
.jpg) |
| <그림 4. 여러 가지 영상들이 본 발명의 실시예에 따른 소자 배치 검사를 위하여 어떻게 사용 또는 조합될 수 있는지를 설명하는 블록도이다.> |
그림 4는 여러 가지 영상을 발생시키기 위하여 여러 가지 조명장치와 영상 획득 장치가 어떻게 이용되는지, 그리고 이들 영상을 어떻게 조합하여 중요한 검사 정보를 제공하는지를 보여주는 개략도이다. 그림 4에 도시된 바와 같이, 영상 획득 장치(300)는 비체계화된 조명 장치(306)와, 카메라(310)와, 체계화된 조명 장치(308)를 포함한다. 영상 획득 장치(302)는 비체계화된 조명 장치(306)와, 카메라(312)와, 체계화된 조명 장치(308)를 포함한다. 알 수 있는 바와 같이, 영상 획득 장치(300)의 카메라(310)와 비체계화된 조명 장치(306)는 상호 협동하여 그레이스케일의 배치 전 영상(gray-scale before image)(314)과 그레이스케일의 배치 후 영상(316)을 발생시키는데, 이들 영상은 그 후 영상 획득장치(300)로부터의 시야에 대응하는 그레이스케일 차(grayscale difference)(델타)영상(318)을 발생시키는 데 이용될 수 있다. 아울러, 카메라(310)와 체계화된 조명 장치(308)는 협동하여 영상 획득 장치(300)의 시야로부터의 체계화된 영상(320)을 발생시킨다.
영상 획득 장치(302)는 영상 획득 장치(300)에 관하여 전술한 것과 유사한, 그러나 스테레오비젼 영상이 촉진되도록 다른 시야로부터의 영상(322, 324, 326)을 발생시킨다. 구체적으로, 영상
(322)은 영상(320)의 획득과 동시에 또는 실질적으로 동일한 시간에 획득되는 것이 바람직하다. 유사하게, 이들 영상(324, 326)은 각각 영상(316, 314)과 실질적으로 동일한 시간에 획득된다.
각각 영상 획득 장치(300, 302)의 다른 시야에서 포착된 상기 두 체계화된 조명 영상들은 조합되어 3차원 기준점 영상(reference point image)(328)을 제공할 수 있다. 또한, 영상 획득 장치(302)로 얻은 그레이스케일 영상들은 조합되어 그레이스케일 델타 영상(330)을 제공할 수 있다. 이 3차원 기준점 영상(328)은 각 그레이스케일 델타 영상(318, 330)을 원근 교정함으로써, 원근(遠近) 교정된 제1 및 제2 그레이스케일 델타 영상(312, 324)을 형성한다. 원근 교정 그레이스케일 영상(332, 334)은 그 후에 복수의 소자 배치 검사를 위하여 사용될 수 있다. 그러한 검사의 예로는 단계 336에 나타낸 바와 같은 부존재/존재 검사, 단계 338에 나타낸 바와 같은 패턴/문자 인식, 단계 340에 나타낸 바와 같은 부분 기하 분석(part geometry analysis), 그리고 단계 342에 나타낸 바와 같은 영상 대칭 분석이 포함될 수 있다. 소자(304) 자체상의 패턴/문자 인식(338)은 단계 344에 나타낸 바와 같이 소자(304)의 정확한 타입 및 값의 검증을 용이하게 한다.
또한, 부분 기하를 분석함으로써, 단계 346에 나타낸 바와 같이,x, y 및 회전(θ) 레지스트레이션(registration)이 측정 및 검증될 수 있다. 마지막으로, 단계 342에 나타낸 바와 같이 영상 대칭을 분석하는 것은, 단계 348에 나타낸 바와 같이 소자 극성(component polarity)을 분석하기 위한 편리한 해법을 제공할 수있다.
조명
다음의 조명 양태는 본 발명의 실시예에 대한 추가적인 이점을제공한다. 실제, 아래에서 설명되는 조명 양태는 본 발명의 양태를 포함하며, 반드시 위에서 설명된 스테레오비젼 기술을 이용하여 실시되어야 하는 것은 아니다. 적합한 영상 품질은 종종 고해상도, 짧은 영상 획득 시간, 카메라를 향한 낮은 타깃 피사체 반사율 및 기타의 원인 때문에 상당히 밝은 조명을 필요로 한다.
LED는 일반적으로 신뢰성이 있고, 효율적이며, 저렴하고, 작기 때문에, 종종 광원으로서 양호하게 선택된다. 그러나 픽 앤드 플레이스 머신에 있어서의 배치 지점 근처의 공간은 필요한 LED들을 배치 지점 근처에 위치시키는 것이 매우 어려울 정도로 심각하게 제한될 수도 있다. 그러한 상황에서는, 광을 원격하게 배치된 LED로부터 타깃 영역으로 전달하도록, 광 파이프, 특히 광섬유 광 파이프(fiber light pipes)를 사용하는 것이 유리하다. 픽 앤드 플레이스 머신에 광 파이프를 이용하는 장점은, 밝은 조명을 위해 충분히 많은 개수의 LED에 의하여 필요한 공간이 배치지점 근처에 장착하기에는 지나치게 넓게 될 가능성이 있다는 것; LED 광원들을 배치 지점으로부터 제거함으로써, 노즐들 근처의 가열(열팽창으로 인하여 소자, 노즐 및 어떤 다른 가열 재료의 치수를 변경시킬 수 있기 때문에 문제가 됨)이 감소된다는 것;LED들이 패키징을 최적화하도록 배열될 수 있다는 것; 그리고 광섬유 광 파이프가 가요성이 있고, 고정 LED 광원을 갖는 가동하는 배치 헤드 상에 도달할 수 있게 적절히 배치될 수 있다는 것을 포함한다.
많은 용례들은 추가적인 처리를 위하여 필요한 특징 또는 세부구조를 드러내도록 적절히 배열된 조명을 필요로 한다. 몇 가지 예에서는, 공간의 효율적인 이용을 위해서 또는 촬상 형태(imaging geometry)의 일부 본질적인 대칭을 보다 양호하게 매칭시키기 위하여, 대칭을 보완하도록 조명을 배열하는 것이 바람직하다. 그 예는 구형 솔더볼(solder balls) 위에 균일한 원형 형태들을 형성하도록 큰 링형 등(ling lights)을 사용하는 것, 라인 스캔 카메라(line scan camera)의 치수를 감소시키기 위하여 선형 조명 장치를 사용하는 것을 포함한다. 상업적으로 입수 가능한 조명 구성은 종종, 분리 패키지형 또는 칩 수준 LED들의 단순히 장방형 또는 원형의 배열이다. 이들 LED 패키지 중 어느 것이라도 물리적으로 임의의 구조로 배열될 수 있지만, 분리 패키지의 치수는 공간을 대충 배치하는 것(coarse space)을 제한하며, 칩 수준 조명 장치 어레이는 대개 평탄한 평면으로 제한된다. 어떤 경우든, 임의의 배열을 구현하는 것은 복잡하고 비용이 많이 드는 일이다. 가요성 광섬유 광 파이프와 접속되는 LED 또는 다른 적절한 광원은 거의 임의적인 조명 구조를 구현하기 위한 적합하고 간단한 기술을 제공한다. 광원의 바람직한 배치 및 방향의 복잡성은 광섬유의 출력단이 어떻게 유지되느냐에 달려있다. 광 파이프로 사용하기에 적합한 광섬유는 일반적으로 매우 가용성이 있고 비교적 직경이 작기 때문에(0.25 내지 1.0 mm), 그러한 배열은 광섬유 광 파이프의 출력단을 하나 이상의 적절히 기계 가공된 부분에 고정시킴으로써 달성될 수 있다.
광섬유 광 파이프를 LED에 효율적으로 접속하는 데에는 전형적으로 LED 패키지 또는 다이(die)와 광섬유 입력단 사이에 렌즈가 필요하다. 각 LED 렌즈와 광섬유는 긴밀하게 정렬된 상태로 유지되어야 한다. 그러면, 전체 조립체는 어느 정도 부피가 커서, 특히 원피스 렌즈 어레이(one-piece lens array)가 사용되는 경우, 맞춤 배치(custom arrangements)에 적합하지 않게 한다. 본 발명의 실시예에 따른 조명 구조의 한 가지 양태는 광섬유 광 파이프 입력단의 LED에 대한 직접적인 접속을 포함한다.
.jpg)
<그림 5. 본 발명의 실시예에 따른 조명 시스템의 개략도이다.>
그림 5는 본 발명의 실시예의 조명 구조의 양태를 예시하는 개략도이다. 그림 5는 기판(203)에 관하여, 배치 지점(360)이 조명장치(306)에 의하여 조명되고 있는 동안에, 영상 획득 장치(300)가 배치 지점(360)의 영상을 획득하도록 배치되어 있는 영상 획득 장치(300)와 노즐(210)을 예시하고 있다. 조명 장치(306)는 복수 개의 개별적인 LED(364)를 구비한 LED 어레이(362)와 같은 개별적인 점 광원(point light source) 어레이를 구비하는 것이 바람직하다. 개별적인 광원(364)에는 적절한 개수의 광 파이프(366)가 결합되어 어레이(362)로부터 배치 지점(366) 근처의 지점으로 조명을 전달한다. 광 파이프(366)의 출력단(368)은 임의의 원하는 방식으로 광 파이프(366)의 출력단(368)을 장착하는 고정구(fixture)(370) 근처에서 결합되는 것이 바람직하다. 이들 출력단(368)은, 영상에 적절한 밝기 또는 명암을 제공함과 아울러, 원하는 영상의 특징적 형태 또는 모양을 제공하기 위하여 적절한 각도로 배치 지점(360)상의 적절한 위치로 조명이 지향되도록, 다발을 이루거나(bundled), 배열되거나 및/또는 윤곽이 형성될(contoured) 수 있다. 또한, 이들 출력단(368)은 배치 헤드의 치수, 공간 및 기타 기계적인 제약을 수용하도록 다발을 이루거나(bundled), 배열되거나 및/또는 윤곽이 형성될 수 있다.
.jpg) |
| 그림 6. 본 발명의 실시예에 따른 발광 다이오드(LED)에 장착되는 광 파이프의 확대도이다. |
그림 6은 LED(364)에 결합된 광섬유 광 파이프(366)의 입력단(368)의 개략도이다. LED(364)의 패키지 또는 인캡슐레이션(encapsulation)의 일부에는 광 파이프(366)를 수용하도록 홀(369)이 형성되어 있다. 이러한 방법으로, 광 파이프(366)의 단부는 LED 다이에 매우 인접하여 배치되어 기하학적인 결합 효율을 향상시킬 수 있다.
또한, 광섬유 단부(368)와 LED 인캡슐레이션 또는 패키지 아크릴(372) 사이의 공간은 굴절률 매칭 접착제(index-matching adhesive)로 채워질 수 있다. 그러나 광 파이프(366)에 아크릴 광섬유가 사용되는 경우, 광섬유(366)와 LED 패키지를 단순히 함께 융접하여 손실을 낮출 수 있다. 이러한 배치는 결합 렌즈를 필요로 하지 않고 비교적 높은 결합 효율을 제공한다. 더욱이, 정렬 상태가 고정되고 안정적이어서 최적 패키징의 구성을 취할 수 있다. 예를 들면, 광섬유들은 비교적 홀 각도(odd angle)로 조립체에서 나올 수 있다. 또한, LED와 광섬유 조립체는 견고성(rouggedness)을 향상시키기 위하여 포팅(potting)될 수 있다.
일부의 실시예에서는, 어레이(362)의 모든 LED가 한 가지 색깔이다. 그러면, 영상 획득 장치는 주변광은 차단하고 조명 대역의 파장을 갖는 광을 통과시키는 필터를 포함하는 것이 바람직하다.
그러나 몇 가지 색깔의 LED를 이용하고, 이들과 함께 하나 이상의 적절한 필터가 이용하는 것을 분명히 고려하고 있다.
광학 장치
본 발명의 실시예에 따른 조명 장치가 극히 소형이고 융통성이 있어야 할 뿐만 아니라, 검사 카메라 자체도 촬상될 영역에 대한 치수, 형상 및 투시 접근(viewing access)상의 심한 제약을 수용해야 한다. 촬상용 구성 요소와 조명용 구성 요소가 단일의 집적된 협동 유닛(single, integrated and cooperative unit)으로 패키징되는 것이 바람직하지만, 본 발명의 실시예를 실시하는 데에는 그러한 집적이 반드시 필요한 것은 아니다. 전술한 바와 같이, 영상 획득 장치(300, 302)는 이들 장치가 비교적 높은 투시 각도를 사용하고 이들 각도를 촬상 어레이 상에 적절히 매핑할 수 있도록 틸트된 상 평면(tilted image plane)을 채용하는 것이 바람직하다. 그러한 경사진 상 평면을 사용하는 한 가지 예가 샤임플러그 조건이다. 이 기술은 텔레센트릭 광학 장치(telecentric optics)와 非텔레센트릭 광학장치(nontelecentric optics) 모두에 사용될 수 있지만, 본 발명의 실시예는 非텔레센트릭 장치를 사용하는 것이 바람직하다. 이는 단지 텔레센트릭 촬상용 광학 장치의 조건 중 하나가 텔레센트릭 광학장치의 대물 요소가 시야각(視野角)보다 커야하기 때문이다.
.jpg)
<그림 7. 샤임플러그 조건(Scheimpflug conditions)을 이용하는 픽 앤드 플레이스 머신의 영상 획득 시스템의 광학적 연결장치(optical train)의 개략도이다.>
그림 7은 영상 획득 장치(300, 302) 중 어느 것 또는 양자 모두에 바람직하게 채용되는 광학계의 개략도이다. 광학계(380)는 非텔레센트릭이어서 대물 요소(382)가 시야각보다 더 작은 직경을 가질 수 있다. 또한, 광학계(380)는 非텔레센트릭이기 때문에, 높이(H)가 감소되어 텔레센트릭 광학계에 비하여 소형의 카메라를 제공할 수 있다. 시선들의 배치 지점(306)에 대한 각도적인 접근성(angular access)을 증대 또는 광학계의 직경의 최소화를 위하여, 대물 요소(382)와 배치 지점(360) 사이에는 광학적 정지부(optical stop)(384)가 개재된다. 또한, 광학적 정지부(384)는 주변 광을 차단하는 것을 보조하도록 사용될 수도 있다.
그림 7에 도시된 바와 같이 광학축을 굴절시키기 위하여 반사경(386)이 사용될 수 있다. 광학적 정지부(384)는 대물 요소(382)와 반사경(386) 사이에 배치되는 것이 바람직하다.
非텔레센트릭 광학 장치가 사용되는 경우, 의도된 소자 배치 평면상의 x, y 지점에 대한 x, y 픽셀 어드레스를 맵핑하기 위하여 캘리브레이션 과정(calibration procedure)을 수행하는 것이 권고된다. 이는 소자 배치 영역의 평면상에 캘리브레이션 타깃을 배치함으로써 수행될 수 있는데, 여기에서 상기 캘리브레이션 타깃은 복수 개의 알려진 표시, 바람직하게는 알려진 간격의 알려진 정사각형들을 구비한다. 그 후, 배치 영역의 평면상에 상기 알려져 있는 캘리브레이션 타깃을 투시하면, 광학계가 3×3동차 원근 변환 행렬을 풀 수 있다. 이 행렬은 x, y 픽셀 어드레스를 배치 평면상의 x, y 지점으로, 바람직하게는 밀리미터 단위로 변환한다. 이러한 변환은 또한 원근 왜곡(perspective distortion)은 물론 스케일링(scaling)을 교정한다. 또한, 2개이상의 카메라를 사용하면, 그 2개 이상의 카메라에서 가시적인 특징부로부터 깊이(z) 데이터를 유도하기 위한 양안시(stereopsis)를 위한 캘리브레이션이 용이해진다. 그 z 데이터는 배치 평면에 대하여 수직 방향으로 하방에 높이를 갖는 특징부를 투사하기에 유용하다. 캘리브레이션 타깃의 영상은 그 영상을 이진 영상(binary image)으로 역치화(thresholding)함으로써 처리된다. 검정 정사각형들(black squares)을 배치하기 위하여, 연결성 분석(connectivity analysis)이 수행된다. 그 후, 그레이스케일 영상 내의 각 정사각형의 각 변에 픽셀 미만의 정밀도(sub-pixel accuracy)로 라인들이 정밀하게 맞춰진다. 그 후, 모든 인접한 라인들의 교점이 계산된다. 선택된 수의 정사각형이 영상 내에서 보이면, 그 정사각형의 수와 모서리의 수의 곱(30×4)은 x, y가 높은 픽셀 미만 정밀도로 계산되는 비교적 많은 수의점 들을 제공한다. 이들 지점은 그 후에 캘리브레이션 행렬을 계산하도록 타깃상의 밀리미터로 알려져 있는 모서리 지점과 비교된다.
<그림 8. 본 발명의 실시예에 따른 캘리브레이션 타깃의 개략도이다.>
그림 8은 처리 중의 캘리브레이션 타깃의 영상을 예시하는데, 여기에서 플러스(+) 기호는‘블랍(blob)’중심을 나타내며, 라인 피터들(line fitters)의 배치는 정사각형들의 측부에 직사각형으로 명확히 나타나있다. 극한 원근(extreme perspective)을 취급하기 위하여, 영상(도면 부호 600으로 표시됨) 내의 최대 블랍으로 알고리듬이 시작한다. 캘리브레이션 행렬은 최대의 정사각형에 가장 가까운 정사각형들을 포함시키고, 그 후 격자 내의 모든 정사각형들이 최종 계산에 사용될 때까지 점점 더 정사각형들을 포함시킴으로써, 계속해서 정교화된다(refined). 계산 단계는 다음과 같다. 우선 영상으로부터 모든 블랍이 추출된다. 클립된 블랍(clipped blobs)은 버리고 최대 면적의 블랍의 위치를 정한다. 그 후, 최대 면적의 블랍의 4개의 모서리의 위치를 개략적으로 정한다. 큰 정사각형의 4개의 변에 라인들을 맞추기 위하여 라인 피터(line fitter)가 사용된다. 그 후, 시스템이 회전, 스케일링, 원근 교정으로 3×3 동차 변환 행렬을 풀어서 픽셀 단위를 밀리미터 단위로 변환한다. 이는 비교적 개략적인 개산(槪算)으로서, 영상 내에서 직교하는 정사각형들의 2차원 어레이를 만들게 된다. 그 후, 사전에 찾은 블랍을 지적하는 블랍 포인터(blob pointers)의 2차원 격자가 발생된다. 이는 캘리브레이션 격자내의 알려져 있는 밀리미터 간격을 기초로 한다. 그 후, 최대 블랍의 +/- 1행과 +/- 1열인 격자 내의 블랍(9개 정도의 많은 블랍이 존재할 수 있다)으로 루프(loop)를 시작한다. 루브 내의 각 블랍에 대하여, 새로운 3 x 3 픽셀 대 밀리미터 변환을 풀기 위하여 최대 블랍의 4개의 모서리와 함께 블랍 중심들이 사용된다.
정교화된 변환을 이용하여, 블랍 포인터들의 2차원 격자가 다시 발생되어 앞서 찾은 블랍들을 지시한다. 사용 가능한 격자는 그후 현재 사용되는 블랍들 주위로 +/- 1행 및 +/- 1행만큼 확장된다. 격자 확장이 이미 충족된 경우에는 루프가 종료한다. 그렇지 않으면, 루프는 다음 블랍으로 계속한다. 일단 루프가 완료되면, 루프 실행 중에 계산된 최종 캘리브레이션 행렬을 사용하여 블랍 중심들을 변환한다. 그 후, 격자 내의 모든 블랍의 네 변들 모두에 라인 피터가 배치되고, 모든 인접한 맞춤 라인들의 교점을 구함으로써 격자 내의 모든 블랍에 대하여 모서리들이 계산된다. 마지막으로, 영상에서 찾은 모든 모서리들과 그것들의 예상되는 지점을 사용하여 캘리브레이션 타깃 내의 정사각형 크기 및 격자 간격을 알아냄으로써, 최종 캘리브레이션 행렬이 풀린다.
양시안(stereopsis)을 위한 캘리브레이션은 2개 이상의 카메라를 사용하여 볼 수 있는 특징부로부터의 깊이 데이터를 제공한다. 시계가 중첩되는 2개 이상의 카메라의 캘리브레이션은 전술한 캘리브레이션을 두 번 행함으로써 수행될 수 있다. 배치 평면과 일치하는 캘리브레이션 타깃상에서의 캘리브레이션을 행한 후에, 더 큰 캘리브레이션 타깃을 이용하여 캘립브레이션을 반복한다. 캘리브레이션 타깃의 위치 차이로 인한 각 카메라 영상 내의 영상 특징부들의 공간적인 시프트(spatial shifts)의 방향 및 크기를 분석하고, 카메라들 사이의 그 공간적인 이동을 비교함으로써, 깊이를 결정할 수 있다. 소정 카메라로부터의 거리는 영상시프트 크기에 반비례한다.
영상 획득
본 발명의 실시예는 일반적으로 의도된 배치 지점의 연속된 2개 이상의 연속된 영상(즉, 배치 전 및 후)을 얻는다. 그러한 배치는 비교적 신속하게 이루어지고, 늦은 머신 쓰루풋은 극히 바람직하지 않기 때문에, 때로는 2개의 연속된 영상을 매우 신속히 획득해야 할 필요가 있는데, 그 이유는 배치 헤드와 기판 사이의 상대적인 이동의 정지는 순식간이기 때문이다. 예를 들면, 약 10밀리초의 주기 내에 2개의 영상을 획득할 필요가 있을 수도 있다.
본 발명의 여러 가지 양태에 따르면, 복수 개의 일련의 영상의 신속한 획득은 다른 방법으로 수행될 수 있다. 한 가지 방법은 상업적으로 입수 가능한 CCD 장치를 사용하여 그것들을 비표준 방법으로, 그 장치로부터 판독될 수 있는 것보다 더 빠른 속도로 영상을 획득하는 것이다. 다른 한 가지 방법은 공통 광학 장치를 통해서 의도된 배치 지점을 투시하도록 배치된 복수 개의 CCD 어레이를 이용하는 것이다.
.jpg)
<그림 9. 본 발명의 실시예들에 유용한 인터라인 전송(interline transfer) CCD 어레이의 개략도이다.>
.jpg)
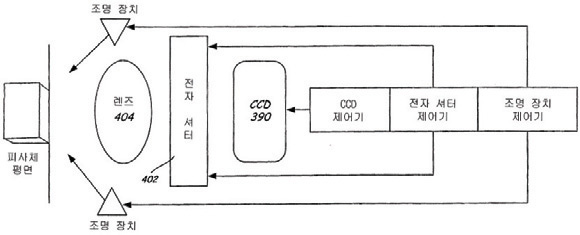
<그림 10. 본 발명의 실시예에 따른 전자 셔터를 이용하는 영상 획득 장치의 개략도이다.>
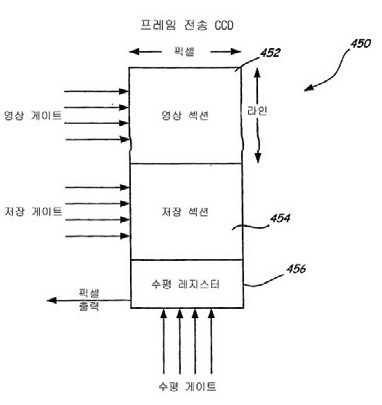
<그림 11. 본 발명의 실시예들에 유용한 프레임 전송 CCD 어레이의 개략도이다.>
현재 두 가지 일반적인 형태의 CCD 어레이 아키텍쳐, 즉 인터라인 전송(interline transfer) CCD 어레이(그림 9)와, 프레임 전송(frame transfer) CCD 어레이(그림 11, 이하 각각 IT 및 FT라 칭함)가 존재한다. 이들 두 형태 모두, 광에 대한 노출에 비례하여 전하를 축적하는 영상 영역(image area)과 광으로부터 차폐되는 저장 영역(storage area)을 포함하는 장치로 일반화 될 수 있다. CCD의 영상 영역은 포토사이트(이하, 픽셀이라 칭함)의 2차원 어레이이다. 저장 섹션과 영상이 그 저장 영역으로, 그리고 그 저장 영역을 통해서 어떻게 전송되는지가 두 가지 장치의 형태를 구별하는 중요한 부분이다. IT CCD에 있어서는, 전체 영상이 수 클록 사이클(clock cycles) 내에 영상 섹션으로 부터 포토사이트에 인접한 저장 섹션으로 전송되는 반면, FT CCD는 영상을 한 번에 한 라인씩 영상 섹션으로부터 저장 섹션으로 전송한다.
.jpg)
<그림 12. 본 발명의 실시예에 다른 인터라인 전송 CCD 어레이를 이용하는 다중 영상획득 방법의 흐름도이다.>
IT CCD(390)의 동작은 일반적으로 다음과 같은 순서로 발생한다. 우선, 영상 영역이 리셋되어, 그림 12의 단계 410에 나타낸 바와 같이, 그것의 포토사이트로부터 임의의 잔류 전하를 제거한다. 일단 리셋이 해제되면, 포토사이트는 단계 412에 나타낸 바와 같이 광에 응답하여 전하를 축적하기 시작한다. 광에 대한 적절한 노출 시간 후, 어레이의 전체 영상 섹션 내의 축적된 전하는, 단계 414에 나타낸 바와 같이, 수 클록 사이클 내에 어레이의 저장 섹션으로 전송된다. 일단 영상이 저장 섹션 내에 있으면, 그것은 광에 의한 전와(轉訛)로부터 보호되고, 다음 영상이 노출될 수 있다. 제1 프레임의 저장 사이트 내로의 전송이 수 클록 사이클 내에 이루어지기 때문에, 각 프레임 획득 사이의 시간지연은 100㎲ 미만일 수 있다. 저장 섹션 내의 제1 영상의 각 라인은 그 후 수평 레지스터(horizontal register)(396)로 전송되는데, 이 레지스터에서 각 픽셀은, 단계 416에 나타낸 바와 같이, 한 번에 하나씩 시프트되고 디지털화된다. 일단 제1 영상이 클록 아웃되면(clocked out), 제2 영상이 클록 아웃될 수 있다. 본질적으로, CCD의 프레임 속도는 영상 내의 라인의 수가 감소함에 따라 증가한다. 그림 7에 도시된 영상 형태(image geometry)의 경우, 영상의 종횡비(aspect ratio)가 틸트(tilt) 방향으로 신장된다. 이 방향에서 전체 영상이 필요하지는 않기 때문에, 이 방향의 해상도는 감소될 수 있다. 영상 라인 해상도 감소는 CCD의 저장 섹션 내의 임의의 원치 않는 라인들을 수평 레지스터(396)로 전송하고 이것들을 시프트시키지 않음으로써 달성될 수 있다.
일단 모든 원치 않는 라인들이 수평 레지스터(396) 내로 클록되면, 수평 레지스터(396)는 그 후에 그것의 전체 길이를 시프트시켜, 제1의 원하는 영상 라인이 저장 섹션(394)으로부터 수평 레지스터(396) 내로 전송되기 전에 그 레지스트로부터 임의의 잔류 전하를 제거한다. 그러므로 프레임 시간은 원치 않는 라인의 수에, 그것이 라인을 수평 레지스트로부터 시프트시키기 위하여 소요하는 시간을 곱한 것과 같은 크기만큼 감소된다.
다른 한 가지 일반적인 형태의 CCD 장치는 프레임 전송 어레이이다. 본 발명의 실시예에 따르면, 이러한 형태도 또한 이용될 수 있다. 그러한 장치(그림 11)의 작동은 일반적으로 다음과 같은 순서로 이루어진다. 우선, 영상 영역(452)이 리셋되어 그 영역으로부터 축적된 잔류 전하를 제거한다. 일단 리셋이 해제되면, 영상 영역(452)을 포함하는 포토사이트가 광에 응답하여 전하를 축적하기 시작한다. 적절한 노출 시간 후, 모든 픽셀의 축적 전하는 수직 방향으로 한 번에 한 라인씩 저장 영역(454) 내로 시프트된다. 모든 라인을 영상 영역으로부터 저장 영역으로 시프트시키는 것이 필요한 것은 아니지만, 시프트될 첫 번째 라인은 가장 아래에 있는 것이어야 한다. 또한, 영상의 아직 차폐되지 않은 부분을 포함하고 있는 포토사이트는 입사광에 계속 노출되고, 따라서 그러한 광에 의하여 전와된다는 것을 유의하는 것이 중요하다. 그러므로 FT 장치는 광이 언제, 그리고 과연 검출기에 도달하는지를 제어하는 몇 가지 외부적인 수단이 있는 환경에서 가장 자주 사용된다.
저장 영역(454) 내의 영상은 IT CCD 구조에서처럼 판독을 위하여 많이 사용할 수 있다. 그러나 핵심적인 차이는 저장된 영상의 모든 라인이 수직으로 시프트되어 수평 판독 레지스터(456)를 로딩함에 따라, 장치의 감광부도 역시 수직으로 시프트된다는 것이다. 이는, 장치의 감광 영역이 후의 판독을 위하여 보관될 영상에 노출되고 있는 동안에는 저장된 영상의 판독이 이루어질 수 없다는 것을 의미한다.
전술한 바와 같이, 영상의 한 축을 따라 완전한 영상 해상도를 이용할 필요는 없다. 그러므로 배치 영역을 커버하는 데 필요한 라인의 수가 영상 어레이 내의 열(columns)의 수보다 더 작다.
어레이의 적절한 방향으로의 배치에 의하여, 배치 지점을 나타내는 행들만이 저장 영역으로 전송될 필요가 있어서 영상 획득 사이에 필요한 시간을 감소시킨다. 공지의 CCD 장치로 정규 규정 프레임 주기 미만의 시간 간격 내에 복수 개의 영상을 취하는 것이 가능하다. 그러한 영상 획득은 제1 영상이 노출된 후에 CCD장치로 향하는 광을 제어하는 방법과 함께 사용되면 용이해진다.
제2 영상의 전와를 방지하기 위해서는, 저장 영역으로부터 제1영상이 저장 영역으로부터 판독되도록 제2 영상이 감광 영역 내에서 대기하고 있는 동안에 무시할 수 있는 수준의 광이 CCD에 도달하는 것을 보장하는 것이 필요하다. 이러한 시나리오에서,제2 영상의 노출은 제1 영상이 저장 영역 내로 전송된 후 매우 짧은 시간을 포함해서 언제든지 시작할 수 있다. 이러한 염려를 해결하기 위한 한 가지 방법은 전자 제어 광셔터(electronically controlled optical shutter)를 사용하여 CCD 어레이로 향하는 광을 제어하는 것이다. 전자 제어 광셔터는 액정 광밸브(liquid crystal light valve), 미소 채널 공간 광 변조기(micro channel spatial light modulator), 전기-광학 광 스위치를 포함하지만, 이들로 한정되지는 않는다.
그림 10은 IT CCD 어레이(390)와 렌즈(404) 사이에 배치된 그러한 전자 셔터(404)를 예시하고 있다. 그림 10에 도시된 시스템의 동작을 그림 12에 도시된 흐름도와 관련하여 설명한다. 단계 410에서 시스템이 초기화되면, 제어 신호도 또한 전자 셔터로 보내져서 셔터를 개방함으로써, 광이 통과할 수 있게 하고 신호를 보내서 CCD(330)의 포토사이트를 리셋한다. 제1 영상이 어레이(390)의 저장 섹션으로 전송된 후에는, 단계 414에 나타낸 바와 같이, 감광 픽셀들이 새로운 영상을 획득하기 시작할 준비를 한다. 적절한 적분 주기(integration period)가 경과된 후, 단계 422에 나타낸 바와 같이, 신호가 전자 셔터(402)로 보내져서 셔터(402)가 닫히게 하고 광이 통과하는 것을 막는다. 단계 424에서, 어레이(390)로부터의 제1 영상의 판독이 종료하고, 단계 426으로 제어가 이어져서 제2 영상이 포토사이트(392)로부터 저장 어레이(394)로 전송된다. 마지막으로, 단계 428에서, 어레이(400)로부터 제2 영상이 판독된다. 또한, FT CCD 어레이의 전자 셔터링(shuttering)을 이용하여 두 개의 완전한 해상도(모든 라인) 영상을 신속하게 연속된 상태로 획득하는 것이 가능하다. 이는, 영역(452)을 리셋하고, 그 영역을 제1 영상에 노출시키며, 감광 영역(452)으로 향하는 추가적인 광을 봉쇄하고,결과적인 영상을 가급적 신속히(장치의 수직 전송 사이클 속도에 의해서만 한정됨) 라인 단위로(line-by-line) 저장 영역(454)내로 시프트시키고, 바람직하기로는 감광 영역(452)을 다시 리셋하고, 그 영역을 제2 영상에 노출시키며, 어레이로 향하는 추가적인 광을 다시 봉쇄한 후, 두 영상 모두를 픽셀 단위(pixelby-pixel) 및 라인 단위로 판독함으로써 수행된다. 이러한 해법은 3개 이상의 영상을 신속하게 획득할 수 있도록 확장될 수 있지만, 그렇게 하기 위해서는 각 영상이 이용 가능한 라인의 100% 미만의 라인을 가져야 할 필요가 있다는 것을 알 수 있다.
예를 들면, 동일한 크기의 3개의 영상을 신속하게 연속해서 획득하기 위해서는, 그 영상은 완전한 영상 치수의 단지 절반으로 제한된다.
CCD의 노출을 제어하기 위한 추가적인 해결책은 촬상 시스템 자체의 조도 및 광학적 환경을 제어하는 것을 포함한다. 광학적 환경을 제어하는 한 가지 방법은 조명 장치의 파장을 제어하여 그 파장이 좁은 파장 범위 내에 있도록 보장하고, 조명장치의 파장 대역 내에 있지 않는 광을 차단하도록 설계되는 필터를 CCD전방에 배치함으로써 주변 광의 영향을 최소화하는 것이다. 이 실시예에 따른 시스템이 채용되는 경우, 카메라는 대역 통과 필터의 파장 내에 속하는 주변 광을 포함하지 않는 환경 내에 배치되어야 한다. 그러면, 어레이 내의 포토사이트는, 카메라에 의하여 제어되고 CCD의 노출과 동기하여 섬광되는 외부의 조명 장치에 대해서만 민감하다. 조명 장치의 파장을 제어하지 않고 주변 광을 제어하는 다른 한 가지 방법은 주변 광이 상대적으로 하위 레벨로 감소되도록 광학적 연결 장치 내에 배치되는 중화 필터(neutral-density filter) 또는 충분히 작은 치수의 정지부를 제공하는 것이다. 주변 광이 감소되면, 조명 장치가 적절한 회수 및 지속기로 스트로브되어(strobed), 작은 정지부 또는 중화 필터가 존재하더라도 충분한 광을 제공하여 포토사이트를 노출시킨다.
.jpg)
<그림 13. 본 발명의 실시예에 따른 빔 스플릿터(beam splitter)를 매개로 복수 개의 CCD 어레이 및 공통의 광학적 연결 장치를 이용하는 영상 획득 장치의 개략도이다.>
그림 13은 영상 획득 장치(300, 302) 중 어느 것 또는 양자 모두에 사용되어, 그렇지 않은 경우 상업적으로 입수 가능한 CCD카메라의 프레임 속도를 초과하게 될 간격으로 복수의 영상을 획득할 수 있는 대안적인 배치를 예시하고 있다. 구체적으로, 시스템(470)은 역시 조명 장치(478)를 제어하는 전자 장치(476)에 결합되는 한 쌍의 CCD 어레이(472, 474)를 포함한다. CCD 어레이(472, 474) 양자 모두는 빔 스플릿터(4800)를 사용하여 이들 양 CCD 어레이(472, 474)가 렌즈(482)를 통해서 피사체 평면(object plane)을 투시할 수 있도록 하는 광학적 연결 장치의 일부이다. 통상 3개의 다른 CCD 어레이를 포함하고, 각 어레이가 다른 파장 대역의 광을 수광하는 오늘날의 현대적인 컬러CCD 카메라에도 유사한 구조가 사용되고 있지만, 그러한 장치가 시간적으로 매우 근사하지만 서로 동시적이지는 않은 복수 개의 실질적으로 단색 화면(monochromatic views)을 얻는 데 사용된 것으로 믿어지지는 않는다. 각 CCD 어레이가 동시에 영상을 촬영하는 대신, 각 CCD 어레이는 시야각 내에 피사체를 배치하기 전, 배치 후 또는 배치 중 언제든 영상을 순차적으로 포착하도록 트리거될 수 있다. 예시된 바와 같이, 전자 장치(476)는 적절한 위치 엔코더를 포함하는 것이 바람직한 트리거 정보 소스(486)는 물론 고속 데이터 버스(484)에도 연결된다. 이러한 실시 양태는 각 CCD 어레이가 각 어레이로부터 판독될 수 있는 것보다 빠른 속도로 영상을 획득하여 3개 이상의 영상을 신속한 순서로 효과적으로 포착하도록 전술한 고속 영상 획득과 조합될 수 있다는 것을 유의하라.
그림 2와 관련하여 설명된 시스템은 스테레오비젼 촬상을 위하여 사용되는 한 쌍의 카메라를 보여줬지만, 추가적인 이점을 위하여 추가의 카메라 및 조명 장치를 사용할 수 있다. 따라서 본 발명의 한 가지 양태는 시야의 중첩 영역과 비중첩 영역을 모두 포함하는 검사 타깃의 다중의 상보적인 시야를 사용하는 것을 포함한다. 다중 장면은 타깃을 완전히 커버할 수 있다. 임의의 장면의 비중첩 영역은 다른 모든 장면에서 빠진 정보를 채운다. 이는 시야가 통상적으로 바로 위에 있지 않는 검사 용례를 위하여 특히 중요한데, 그 이유는 수직 시야는 부분적으로 가려지기 때문이다.
동일한 타깃의 다중의 구별된 시야는 임의의 단일 영상만으로 유도할 수 없는 독특한 정보를 발생시키기 위하여 사용될 수 있다. (1) 시야의 중첩 부분은 중복 데이터를 제공하여 공통 영역의 특징부에 대한 인식을 향상시킨다. (2) 중첩 영역은 직접 또는 몇가지 종류의 특별한 준비(예컨대 체계화된 조명)를 거쳐 높이와 같은 독특한 정보를 유도하는 데 사용될 수 있다. 다중 영상은 1) 전체적으로 분리된 조명, 광학 장치 및 검출기, 2) 전체적으로 분리된 광학 장치 및 검출기와 공통의 조명, 3) 분리된 검출기와 공통의 광학 장치 및 조명에 의하여 제공될 수 있다.
가장 간단한 구조는 모든 방향으로부터의 의도된 타깃을 완전히 커버함은 물론 시야각에 있어서 실질적으로 중첩되는 복수의 동일한 완전한‘카메라(검출기, 광학 장치, 조명)’로 이루어진다.
.jpg)
<그림 14. 본 발명의 실시예에 따라 배치 지점의 복수 개의 장면을 발생시키는 데 사용되는 다중 영상 획득 시스템의 개략적인 평면도이다.>
.jpg)
<그림 15. 다중 광로 촬상 시스템의 개략도이다.>
그림 14는 4-카메라 구조의 위에서 도시한 개략도이다. 카메라(300, 302, 500, 502)가 영상을 포착하고, 또한 조명도 제공할 수 있다. 타깃의 각 모서리의 작은 부분은 4개의 시야 중 하나에서만 보인다는 것을 주목하라. 또한, 시야 쌍들 사이에는 상당한 중첩 영역이 존재한다. 인식도를 개선하기 위하여 다중 시야를 사용하면 여러 가지 장점이 제공된다. 이 방법은, 단일 시야에서 원하는 타깃을 커버하기 위하여 복잡한 광학 장치에 의존하기 보다는, 적은 수의 함께 작동하는 비교적 단순한 카메라들을 이용한다. 완전한 범위를 커버할 뿐 아니라, 다른 카메라 시야의 중복적인 중첩 부분으로부터 추가적인 정보를 입수할 수 있다. 이는 단일 카메라로부터는 입수할 수 없다. 또한, 중복에 의해서 어느 정도의 신뢰성이 제공되고 부가되는데, 그 이유는 다중 시야로, 하나의 영상에 있어서 가려진 영역들이 교정되거나 그렇지 않으면 다른 영상의 유사한 부분으로 대체될 수 있기 때문이다.
또한, 적절한 광학 장치를 사용하는 경우, 다중 광로를 갖는 촬상시스템을 사용함으로써 복수의 장면을 모으도록 단일 검출기가 사용될 수도 있다. 그림 15는 그러한 촬상 시스템의 개략도이다.
각각의 분리된 시야(504, 506)가 적절한 광학 장치(508)에 의하여 검출기 표면의 서브셋(subset)으로 지향된다. 그러므로 검출기에 의하여 획득되는 영상은 509로 도시된 바와 같은 두 장면을 모두 포함하게 된다. 이는, 검출기가 극히 비싸거나 또는 공간적 제약으로 장면들이 광섬유 또는 다른 수단에 의해 원격한 검출기로 전송될 필요가 있는 경우에 특히 유용하다.
영상 처리
전술한 바와 같이, 인쇄 회로 기판 위에서의 소자의 배치를 검증하는 것은 소자가 배치될 것으로 예상되는 회로 기판 위의 지점의 배치 전 영상과 배치 후 영상을 획득한 후, 다른 영상으로부터 하나의 영상을 빼는 것으로 이루어진다. 배치 전 영상과 배치후 영상 사이에서 변하지 않는 영상 부분이 그렇게 해서 삭제되고, 새롭게 배치된 소자의 오류(artifacts)가 결과적인 영상에 명확히 나타난다. 그러나 기계적인 진동 및 정밀하지 않은 기계적인 동작으로 인하여, 또는 영상 획득 시 인쇄회로기판 또는 카메라의 움직임 때문에, 배치 전 영상과 배치 후 영상은 일반적으로 완벽하게 정렬되지는 않는다. 두 개의 영상이 정렬되지 않는 경우, 결과적으로 구별되는 영상에 오류가 나타나는데, 이는 소자에 존재하는 거짓 지표(false indicator)가 될 수 있다. 두 영상의 오정렬을 평가하는 한 가지 방법은 상호 연관 분석(correlation)을 사용하는 것이다. 그러나 상호 연관 분석은 템플레이트(template) 내에 직각 모서리가 존재하는 경우에만 작동한다. 모서리가 작용하지 않거나 한 방향으로만 모서리가 존재하는 경우, 상호 연관 분석으로는 정렬을 위한 독특한 (x, y) 지점은 발생하지 않게 된다.
본 발명의 실시예에 따라 사용되는 것과 같은 투시 시스템은 CAD 데이터가 이용 가능하고 그 투시 시스템이 기판상에서 그것이 CAD 내용과 관련하여 그것이 투시하고 있는 곳이 어디인지를 알고 있는 경우에는 템플레이트를 위한 양호한 지점들을 포착할 수 있다. 별법으로, 투시 시스템이 가능한 시야각마다 보임으로써 오프라인으로 교시될 수 있으면, 그 투시 시스템은 양호한 지점 또는 템플레이트를 사전에 결정할 수 있다. 그러나 이러한 조건 중 어느 것도 참(true)이 아닌 경우, 투시 시스템은 가동시간 동안 양호한 템플레이트 지점을 신속히 결정해야 한다.
본 발명의 한 가지 실시 양태는 다른 하나의 영상 내에서 상호연관 분석을 위한 템플레이트를 선택하기 위하여 하나의 영상 내에서 양호한 지점들을 결정하는 효율적인 계산 방법을 제공한다.
그 방법이 그림 16에 예시되어 있고, 단계 510에서 시작하는데, 이 단계에서는 배치 전 영상에서 소벨 연부 필터(Sobel edge filter)가 계산되어, 모든 픽셀 둘레의 가장 강한 연부의 크기 및 방향을 계산한다. 단계 512에서, 연부 크기는 역치이고, 연부 방향들은 8개의 각도, 즉 0, 45, 90, 135, 180, 225, 270 및 315도 중 하나로 라운드된다.
.jpg)
<그림 16. 본 발명의 실시예에 따른 영상 비교를 용이하게 하는, 획득 영상 내의 지점들의 검증 방법의 흐름도이다.>
.jpg)
<그림 17. 픽셀 및 그 둘레의 인접부의 개략도이다.>
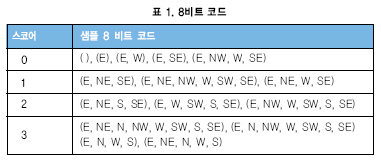
그림 17은 픽셀(514)과 그것의 8개의 인접부를 예시한다. 각 화살표는 정규(normal)의 연부 방향(edge direction)을 나타낸다. 단계 516에서, 각 픽셀에 대하여 8개의 방향이 8 비트 바이트(연부 엔코드 픽셀)로 엔코딩된다. 이 단계에서 표시되는 8개의 방향은 그것들의 나침반 방향으로 다음과 같이, 즉 동-7, 북동-6, 북-5, 북서-4, 서-3, 남서-2, 남-1 및 남동-0으로 표시될 수 있다. 단계 508에서, 엔코드된 데이터에 대하여 OR 연산 박스카 필터(OR’ing boxcar filter)가 실행된다. 저역 필터와 같이 평균을 계산하는 정규의 박스카 필터와 달리, 이 OR 연산 박스카 필터는 개구 인접부(aperture neighborhood) 내의 픽셀들에 대하여 비트 방향 OR 연산을 수행한다. 그 개구는 5×5 픽셀 또는 7×7 픽셀일 수 있다. 연부 엔코드 픽셀의 결과적인‘영상’에 있어서, 각 픽셀은 어떤 연부 방향이 그것의 5×5 또는 7×7 인접부 내에 존재하는지를 나타낸다. 단계 520에서, 영상내의 모든 8 비트 연부 엔코드 픽셀에 대하여 스코어를 할당하기 위하여, 예정된 룩업 테이블이 사용된다. 일반적으로 작은 수의 스코어만이 필요하다. 8 비트 코드가 룩업 테이블에 인덱스되기 때문에, 룩업 테이블은 28 또는 256 원소(elements)만 필요로한다. 256개의 8비트 연부 엔코딩 값의 대부분은 대칭이므로, 다음 표에는 몇 개의 샘플 스코어만이 기재되어 있다.
단계 522에서, 영상의 치수는 4×4 인접부의 스코어들을 더함으로써 감소된다. 대안으로, 4×4 또는 보다 큰 개구 치수의 영상에 부가적인 박스카 필터(boxcar filter)를 적용할 수 있다.
마지막으로 단계 524에서, 스코어들의 결과적인 영상은 높은 스코어에 대하여 스캔된다. 높은 스코어는 본래의 영상에 있어서 상호 연관 분석 템플레이트로서 사용될 수 있는 양호한 지점을 나타낸다. 소자는 영상의 중심 부분 내의 어느 곳에 배치될 것이기 때문에, 높은 스코어에 대한 조사는 영상의 중심부 외측으로 제한되어야 한다.
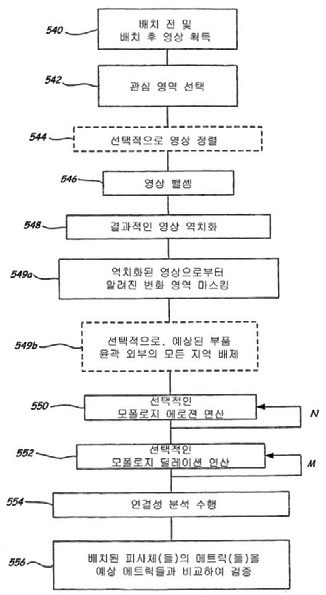
<그림 18. 본 발명에 따라 소자 배치를 검증하기 위하여 영상을 분석하는 방법의 개략도이다.>
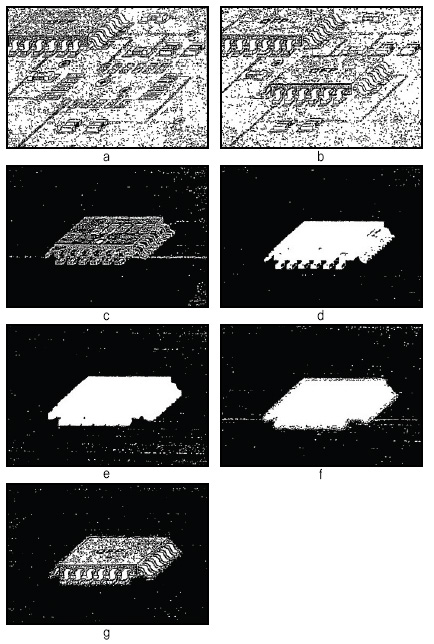
<그림 19. 본 발명의 실시예에 따라 사용 및/또는 생성되는 예시적인 영상들이다.>
그림 18은 본 발명의 실시예에 따라 획득된 영상을 분석하여,단계 536에서, 소자 부존재/존재를 결정하는 방법을 예시하고 있다. 단계 540에서, 배치 전 영상과 배치 후 영상이 모두 획득된다. 배치 전 영상과 배치 후 영상의 예가 각각 그림 19에 제시되어 있다. 점선으로 도시된 단계 544는 1차원 또는 2차원 상관관계 분석을 사용하여 두 개의 영상을 정렬시키는 선택적인 단계를 나타낸다. 그림 16 및 그림 17과 관련하여 전술한 정렬 방법을 이용하는 것이 바람직하다. 단계 546에서, 정렬된 배치 전 영상과 배치 후 영상을 서로 뺀다. 모든 픽셀에는 그것의 절대치가 부여된다. 이 단계에서는 영상에 있어서의 변화가 강조되며, 따라서 두 개의 영상 사이의 차이를 강조한다. 예시적인 차 영상(difference image)이 그림 19c에 예시되어 있다. 단계 548에 서 그 차 영상이 역치화되어(thresholded), 그림 19d에 도시된 것과 유사한 영상을 제공한다. 차영상을 역치화하면 변화가 없는 영역으로부터 변화 영역을 구별하는 이진 영상(binary image)을 생성한다.
단계 549a에서, 가령 노즐과 노즐의 그림자(reflections)와 같은 두 개의 영상 사이에 항상 변화하는 것으로 알려진 영역은 역치화된 영상으로부터 마스킹된다. 이러한 마스킹은 검은색 다각형을 변화하는 것으로 알려진 영역에 채워서 그림으로써 이루어진다. 알려져 있는 변화된 마스크 영상은 그 후에 역치화된 영상과 AND 연산된다. 선택적으로, 소자의 길이, 폭, 높이를 포함하는 소자의 데이터가 이용 가능한 경우, 단계 514에서, 그렇지 않으면 검은색인 영상 내에서, 소자에 의하여 점유될 것으로 예상되는 용적의 상평면에 2차원 프로젝션을 커버하는 백색 마스크를 발생시킨다. 이러한 마스킹은, 백색 다각형을 소자가 배치될 영역에 채워서 그림으로써 이루어진다. 예상되는 소자 마스크 영상은 그 후 역치화된 영상과 AND 연산된다.
단계 550에서,‘ N’으로 표시된 루프로 나타낸 바와 같이, 임의의 모폴로지 에로젼 연산(morphological erosion operations)이 1회 이상 수행될 수 있다. 이러한 에로젼 연산은 노이즈 또는 영상 오정렬의 결과인 작은 피사체들을 제거하는 데 유용하다. 단계 552에서, 다른 한 가지 선택적인 모폴로지 연산이 제공된다. 구체적으로, 단계 552는‘M’으로 표시된 루프로 나타낸 바와 같이, 1회 이상 수행될 수 있는 선택적인 딜레이션 연산(dilation operation)을 제공한다. 그 딜레이션 연산은 에로젼 연산에 의하여 또는 배경 영상과 매칭되는 소자의 특징부에 의해서 분리되었던 단일 피사체의 부분들을 융합시키는 것을 용이하게 한다. 그러한 딜레이션 연산 후의 예시적인 영상이 그림 23e에 제시되어 있다. 단계 554에서, 연결성 분석(connectivity analysis)이 수행되어 영상 내의 피사체를 찾는다. 이 분석은 영상 내의 각 피사체상에 많은 유용한 메트릭들(metrics), 가령 피사체 중심, 길이, 폭, 면적, 회전 등을 발생시킨다. 마지막으로, 단계 556에서, 소자 배치는 예상된 피사체 메트릭들을 갖는 영상 내에서 찾은 피사체의 메트릭들을 비교함으로써 검증된다. 이러한 비교는 중심 지점, 폭, 면적, 회전 등과 같은 메트릭들을 포함하지만 이들로 한정되지는 않는다.
<그림 20. 본 발명의 실시예에 따라 소자 배치를 검증하기 위하여 영상을 분석하는 다른 한 가지 방법의 개략도이다.>
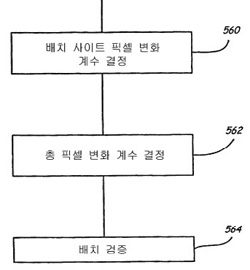
그림 20은 본 발명의 실시예에 따라 소자 부존재/존재를 결정하기 위하여 영상을 분석하는 다른 한 가지 방법을 보여주는 개략도이다. 그림 20에 도시된 방법은 또한 그림 18과 관련하여 설명된 단계 540, 542, 544, 및 546을 포함한다. 따라서 이들 단계는 그림 20에는 설명되거나 도시되지 않으며, 그림 20은 단계 546 후에 실행하는 단계 560으로 시작한다. 단계 560에서, 배치 사이트의 픽셀 변화 계수(pixel change count)가 결정된다.
이는, 값이 어느 정도 역치 위에 있고 또한 소자가 배치될 것으로 예상되는 영상의 영역 내에 있는 픽셀들을 카운트하는 것으로 이루어진다. 단계 562에서, 어느 정도 역치 위에 있고 소자가 배치될 것으로 예상되는 영상의 영역 내에 있지 않은 픽셀들을 카운트함으로써 총 픽셀 계수의 값이 결정된다. 단계 564에서, 배치사이트 픽셀 변화 계수(단계 560)를 통 픽셀 변화 계수(단계 562)와 비교함으로써 소자 배치 검증이 이루어진다.
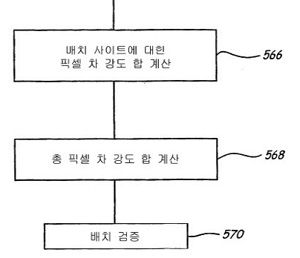
<그림 21. 본 발명의 실시예에 따라 소자 배치를 검증하기 위하여 영상을 분석하는 또 다른 한 가지 방법의 개략도이다.>
그림 21은 본 발명의 실시예에 따라, 단계 336에서, 소자 부존재/존재를 결정하기 위하여 영상을 분석하는 또 다른 한 가지 방법의 개략도이다. 그림 21에 도시된 방법도 그림 18과 관련하여 설명된 단계 540, 542, 544, 및 546을 포함한다. 따라서 이들 단계는 그림 21에 설명되거나 도시되어 있지 않으며, 그림 21은 단계 546 후에 실행되는 단계 566으로 시작한다. 단계 566에서는, 값이 역치 위이고 또한 소자가 배치될 것으로 예상되는 영상 영역 내에 있는 픽셀들을 합하여, 배치 사이트에 대하여 배치 사이트 픽셀 차 강도 합이 계산된다. 단계 568에서, 총 픽셀 차 강도 합은 전체 차 영상(difference image) 내의 픽셀 강도 값을 합함으로써 계산된다. 단계 570에서, 총 픽셀 차 강도 합에 대하여 배치 사이트 픽셀 차 강도 합을 비교함으로써 소자 배치가 검증된다.
<그림 22. 본 발명의 실시예에 따른 값(value)/타입(type) 검증, X, Y, θ위치 레지스트레이션 측정 및 극성 결정을 위한 영상 분석 방법의 개략도이다.>

<그림 23. 본 발명의 실시예에 따른 캘리브레이션 타깃(calibration target)의 개략도이다.>
그림 22는‘값/타입 검증’, ‘X, Y, 세타 레지스트레이션 측정’,‘ 극성 결정’을 위하여 영상을 분석하는 방법의 개략도이다.
그림 22에 예시된 방법은 그림 18과 관련하여 설명된 단계 540, 542, 544, 546, 548, 549a 및 549b를 포함한다. 따라서 이들 단계는 그림 22에 설명되거나 도시되어 있지 않으며, 그림 22는 단계 549b 후에 실행되는 단계 582로 시작한다. 순차적인 단계 544 내지 549b 및 582 내지 584는 마스크 영상을 생성한다. 단계 544 내지 549b는 위에서 설명되었다. 단계 582는 역치화 차영상에 대한 복수의 3×3 이진 딜레이션 연산을 행한다. 단계 584는 딜레이션된 차 영상을 블러링하여 그림 19f와 유사한 영상을 발생시키는 큰 박스카 필터(대개 19×19 픽셀)이다. 단계 586에서는, 단계 584에서 생성되는 블러링된 마스크 영상을 단계 540에서 획득된‘배치 후 영상’과 곱한다. 이는 영상내의 배치된 소자를 격리시키고, 영상의 변하지 않는 부분들을 소거한다. 블러링된 마스크를 배치 후 영상과 곱하는 것이 블러링되지 않은 마스크 영상을 배치 후 영상과 단순히 AND 연산하는 것 보다 더 양호한데, 그 이유는 마스크를 그레이스케일 영상과 AND 연산하면 마스크의 둘레를 따라 인공적인 연부(artificial edges)가 발생되기 때문이다. 그러한 곱셈으로 발생되는 예시적인 영상이 그림 19g에 제시되어 있다.
단계 588은 소자의 리드 또는, 리드(실질적으로는 볼)가 부품의 하부에 감춰져 있는 BGA의 경우에는, 소자의 네 측부를 배치하기 위하여, 라인 피터 및‘자’또는‘캘리퍼’와 같은 여러 가지 영상 계측 공구(image metrology tool)를 배치한다. 소자의 리드 및/또는 측부가 배치된 후, 소자의 X, Y 및 세타 위치가 계산될 수 있다.
유사하게, 단계 586에서‘값/타입 검증’을 위해서 생성된 영상에 대해서는 광학적 문자 인식(OCR) 또는 상관관계 분석이 이용될 수 있다. 또한, 동일한 영상에 대하여 극성을 측정하기 위하여 추가적인 계측 공구가 적용될 수 있다.







