심플한 구성으로 핀 배치 변경작업 효율성 자동화
본 발명에 따르면, 전자 부품 실장 장치용의 하부 받침핀 모듈은, 적어도 상면이 자성체로 마련된 하부 받침 베이스 부의 임의의 위치에 세워져 마련되어 기판을 하면측으로부터 받쳐서 지지한다. 전자 부품 실장 장치용의 하부 받침핀 모듈은, 영구 자성을 갖는 마그넷 부재를 승강 가능하게 내장하고 상기 마그넷 부재가 하강한 상태에서 인자력에 의해 하부 받침 베이스 부에 고정되는 베이스 부와, 상기 베이스 부로부터 위쪽으로 연장되며 상단부가 기판의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 그러므로 상기 마그넷 부재를 하강 및 상승시킴으로써, 상기 베이스 부를 상기 하부 받침 베이스 부로부터 고정 및 고정 해제할 수 있다. 따라서 심플한 구성에 의해 핀 배치 변경 작업을 효율적으로 자동화할 수 있다.
배경 기술
기판에 전자 부품을 실장하는 기판 실장 공정에 있어서, 기판은 하면측이 하부 받침부에 의해 지지되는 상태로 위치 결정 및 유지된다. 기판의 하부 받침 방식으로서는, 복수의 하부 받침핀을 기판의 하면에 접촉시켜 상기 기판을 지지하는 하부 받침핀 방식이 널리 이용되고 있다. 상기 하부 받침핀 방식에서의 핀의 배치 방법으로서, 핀 장착 구멍이 격자형으로 형성된 하부 받침 베이스를 이용하는 종래의 방법 대신에, 복수의 자립형 지지핀(하부 받침핀)을 자석의 자력(磁力)에 의해 지지 프레임(하부 받침 베이스)에 고정하는 방법이 이용되고 있다(일본 특허 공개 제2003-283197호 공보 참조). 이에 의해, 핀 장착 구멍의 배치 위치에 제약받지 않고, 기판에서의 하부 받침 요구되는 부위에 맞추어 지지핀을 적절히 배치할 수 있다는 이점이 있다.
발명의 내용
해결하려는 과제
최근 전자 기기의 생산 형태에 있어서는, 다품종 소량 생산이 주류를 이룬다. 부품 실장의 분야에 있어서, 기판종의 교체에 따른 재배치 작업을 빈번하게 실행하게 하고 있다. 따라서 종래의 작업자의 수동 조작에 의해 실행되는 기판종의 교체에 따른 하부 받침핀의 배치 변경 작업을 자동화하고, 재배치 작업의 노동 절약, 고효율화하는 것이 요구되고 있다. 그러나 상기 특허문헌에 기재된 예를 포함하여, 자력에 의해 하부 받침핀을 고정하는 방식의 기판 하부 받침 방법에 있어서는, 하부 받침핀의 배치 변경 작업을 자동화하는 경우, 후술하는 문제가 발생한다. 즉, 핀의 배치 변경 작업에 있어서, 자력에 의해 하부 받침 베이스에 고정된 하부 받침핀을 자력에 의한 고정력에 저항하여 하부 받침 베이스로부터 이격시킬 필요가 있다. 이때 전자 부품 실장 장치에 마련된 실장 헤드의 이동 및 실장 기능을 이용함으로써, 하부 받침핀의 배치 변경 작업을 편리하게 실행한다. 실장 헤드에 장착된 흡착 노즐의 흡착 유지력에 의해, 하부 받침핀을 하부 받침 베이스로부터 착탈하는 것이 요구된다.
일반적으로 실장 헤드에 장착된 흡착 노즐은 교환 가능하고, 상기 흡착 노즐이 자동 교환 가능하도록 소정의 노즐 클램프에 의해 실장 헤드에 유지되어 있다. 이러한 구성을 갖는 실장 헤드에 의해 하부 받침핀을 이동시키려면, 노즐 클램프력이 하부 받침 베이스에 하부 받침핀을 고정하는 고정력보다 커야할 필요가 있다. 그러나 상단부가 기판의 하면에 접촉한 상태에 있을지라도 하부 받침핀은 안정하게 위치 유지되는 것이 요구되기 때문에, 상기한 고정력은 하한이 있다. 고정력의 하한은 흡착 노즐의 노즐 클램프력 보다 크다. 따라서 자력에 의해 하부 받침핀을 고정하는 방식의 기판 하부 받침 방법에 있어서, 하부 받침핀의 배치 변경 작업을 자동화하기 위해서 유지력이 큰 기계식 척(chuck) 기구를 마련한 전용 노즐을 필요로 한다. 따라서 장치 구성의 복잡화를 피하기 어려웠다. 상기한 바와 같이, 자력에 의해 고정하는 종래 방식의 하부 받침핀 및 기판 하부 받침에 있어서는, 간단한 구성에 의해 재배치 작업에 따른 핀의 배치 변경 작업을 효율적으로 자동화하는 것이 곤란하였다.
본 발명은 간단한 구성에 의해 핀 배치 변경 작업을 효율적으로 자동화할 수 있는 전자 부품 실장 장치, 전자 부품 실장 방법 및 하부 받침핀 모듈의 배치 변경 방법을 제공하는 것을 목적으로 한다.
과제의 해결 수단
본 발명의 전자 부품 실장 장치는, 실장 헤드에 장착된 흡착 노즐에 의해 전자 부품을 유지하고 기판에 실장한다. 상기 전자 부품 실장 장치는, 적어도 상면이 자성체로 마련된 하부 받침 베이스 부와, 상기 하부 받침 베이스 부의 임의의 위치에 세워져 마련되어 상기 기판을 하면측으로부터 받쳐서 지지하는 복수의 하부 받침핀 모듈을 갖는 기판 하부 받침 장치를 포함한다. 상기 하부 받침핀 모듈은, 내부에 마련된 승강실 내에서 미끄럼 이동하며 영구 자성을 갖는 마그넷 부재와 함께 승강하는 피스톤을 내장하고, 상기 마그넷 부재가 하강한 상태에서 하부 받침 베이스 부에 인자력(引磁力)에 의해 고정되는 베이스 부와, 상기 베이스 부로부터 위쪽으로 연장되며 상단부가 기판의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 축 형상부에 마련되고 상단부에서 개구되며 승강실에 연통되는 흡인 구멍으로부터 흡착 노즐에 의해 진공 흡인을 실행함으로써, 피스톤과 함께 마그넷 부재를 상승시켜 하부 받침 베이스 부로부터 이격시킴에 따라, 인자력을 감소시켜 베이스 부를 하부 받침 베이스 부로터 고정 해제한다.
본 발명의 전자 부품 실장 방법은, 실장 헤드에 장착된 흡착 노즐에 의해 전자 부품을 유지하고 기판에 실장하는 전자 부품 실장 방법으로서, 적어도 상면이 자성체로 마련된 하부 받침 베이스 부와, 상기 하부 받침 베이스 부의 임의의 위치에 세워져 마련되어 상기 기판을 하면측으로부터 받쳐서 지지하는 복수의 하부 받침핀 모듈을 갖는 기판 하부 받침 장치에 있어서 기판 하부 받침핀 모듈의 배치를 변경하는 핀 배치 변경 공정을 포함한다.
상기 하부 받침핀 모듈은, 내부에 마련된 승강실에서 미끄럼 이동하며 영구 자성을 갖는 마그넷 부재와 함께 승강하는 피스톤을 내장하고, 상기 마그넷 부재가 하강한 상태에서 하부 받침 베이스 부에 인자력에 의해 고정되는 베이스 부와, 상기 베이스 부로부터 위쪽으로 연장되며 상단부가 기판의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 축 형상부에 마련되고 상단부에서 개구되며 승강실에 연통되는 흡인 구멍으로부터 흡착 노즐에 의해 진공 흡인을 실행함으로써, 피스톤과 함께 마그넷 부재를 상승시켜 하부 받침 베이스 부로부터 이격시킴에 따라, 인자력을 감소시켜 베이스 부를 하부 받침 베이스 부로터 고정 해제한다.
본 발명의 하부 받침핀 모듈의 배치 변경 방법은, 실장 헤드에 장착된 흡착 노즐에 의해 전자 부품을 유지하고 기판에 실장하는 전자 부품 실장 장치에 있어서, 적어도 상면이 자성체로 마련된 하부 받침 베이스 부의 임의의 위치에 세워져 마련되어 하면측으로부터 기판을 받쳐서 지지하는 하부 받침핀 모듈의 배치를 변경하는 것이다.
상기 하부 받침핀 모듈은, 영구 자성을 갖는 마그넷 부재를 승강 가능하게 내장하고 상기 마그넷 부재가 하강한 상태에서 하부 받침 베이스 부에 인자력에 의해 고정되는 베이스 부와, 상기 베이스 부로부터 위쪽으로 연장되며 상단부가 기판의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 상기 하부 받침핀 모듈을 흡착 노즐에 의해 유지하고 실장 헤드를 이동시켜 하부 받침 베이스 부에 하부 받침핀 모듈을 배치하는 핀 배치 공정에 있어서, 베이스 부를 하부 받침 베이스 부에 접촉시켜 마그넷 부재를 하강시킴으로써, 인자력에 의해 베이스 부를 하부 받침 베이스 부에 고정한다. 하부 받침핀 모듈을 흡착 노즐에 의해 유지하고 실장 헤드를 이동시켜 하부 받침 베이스 부로부터 하부 받침핀 모듈을 해제하는 핀 해제 공정에 있어서, 축 형상부에 마련되고 상단부에서 개구되며 승강실에 연통되는 흡인 구멍으로부터 흡착 노즐에 의해 진공 흡인을 실행함으로써, 피스톤과 함께 마그넷 부재를 상승시켜 하부 받침 베이스 부로부터 이격시킴에 따라, 인자력을 감소시켜 베이스 부를 하부 받침 베이스 부로터 고정 해제한다.
발명의 효과
본 발명에 따르면, 전자 부품 실장 장치용의 하부 받침핀 모듈은, 적어도 상면이 자성체로 마련된 하부 받침 베이스 부의 임의의 위치에 세워져 마련되어 기판을 하면측으로부터 받쳐서 지지한다. 전자 부품 실장 장치용의 하부 받침핀 모듈은, 영구 자성을 갖는 마그넷 부재를 승강 가능하게 내장하고 상기 마그넷 부재가 하강한 상태에서 인자력에 의해 하부 받침 베이스 부에 고정되는 베이스 부와, 상기 베이스 부로부터 위쪽으로 연장되며 상단부가 기판의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 그러므로 상기 마그넷 부재를 하강 및 상승시킴으로써, 상기 베이스 부를 상기 하부 받침 베이스 부로부터 고정 및 고정 해제할 수 있다. 따라서 심플한 구성에 의해 핀 배치 변경 작업을 효율적으로 자동화할 수 있다.
발명을 실시하기 위한 구체적인 내용
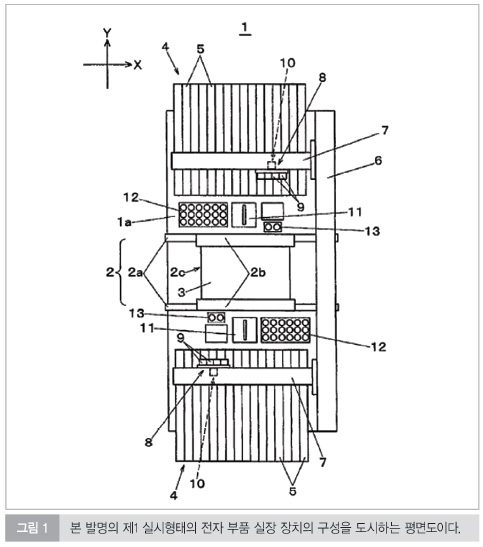
본 발명의 실시형태를 도면을 참조하여 설명한다. 먼저, 그림 1을 참조하여, 전자 부품 실장 장치(1)의 전체 구성을 설명한다. 전자 부품 실장 장치(1)는 실장 헤드에 장착된 흡착 노즐에 의해 전자 부품을 유지하고 전자 부품을 기판에 실장하는 기능을 갖고 있다. 그림 1에 있어서, 베이스(1a)의 중앙부에는 X방향(기판 반송 방향)으로 기판 반송 기구(2)가 배치된다. 기판 반송 기구(2)는 상류측으로부터 반입된 기판(3)을 반송하고, 이하에 설명하는 부품 실장 기구에 의해 실장 작업 위치에 기판을 위치시키는 기능을 갖고 있다. 기판 반송 기구(2)의 중앙부에는, 반입된 기판(3)을 하측으로부터 지지하기 위한 기판 하부 받침 기구(2c)와, 상기 기판 하부 받침 기구(2c)에 의해 들어 올린 기판(3)의 2개의 대향변의 측단부를 상부로부터 압박하여 클램핑하는 압박 부재(2b)가 마련된다.
기판 반송 기구(2)의 양측에는 실장 대상의 전자 부품을 공급하는 부품 공급부(4)가 배치된다. 부품 공급부(4)에는 복수의 테이프 공급기(5)가 평행하게 배치된다. 테이프 공급기(5)는 이송 테이프에 의해 유지된 부품을 후술하는 부품 실장 기구에 의한 취출 위치까지 피치 이송하는 기능을 갖고 있다. 베이스(1a) 상면의 X방향의 일단부 상에는, Y축 이동 테이블(6)이 배치되어 있다. Y축 이동 테이블(6)에는, 2개의 X축 이동 테이블(7)이 Y축 방향으로 미끄럼 이동 가능하게 접속되어 있다. X축 이동 테이블(7)에는, 실장 헤드(8)가 미끄럼 이동 가능하게 각각 장착되어 있다.
실장 헤드(8)는 복수의 단위 유지 헤드(9)를 갖는 다련형(多連型) 헤드이다. 단위 유지 헤드(9)의 하단부에 마련된 노즐 헤드(9a)에 장착된 부품 흡착용의 흡착 노즐(35A)에 의해 테이프 공급기(5)로부터 실장 대상인 전자 부품(P)을 진공 흡착하여 유지한다. Y축 이동 테이블(6) 및 X축 이동 테이블(7)은, 실장 헤드(8)를 이동시키는 헤드 이동 기구를 구성한다. 헤드 이동 기구가 구동함으로써, 실장 헤드(8)는 부품 공급부(4)와 기판 반송 기구(2)에 위치된 기판(3) 사이에서 이동한다. 실장 헤드(8)가 기판(3)에서 승강함으로써, 유지된 전자 부품(P)을 기판(3)에 실장한다. 실장 헤드(8) 및 이 실장 헤드(8)를 이동시키는 헤드 이동 기구는, 부품 공급부(4)로부터 부품을 취출하여 기판(3)에 부품을 실장하는 부품 실장 기구를 구성한다.
X축 이동 테이블(7)의 하부에는, 실장 헤드(8)와 일체로 이동하는 기판 인식 카메라(10)가 각각 장착된다. 헤드 이동 기구를 구동하여 기판 인식 카메라(10)를 기판 반송 기구(2)에 유지된 기판(3)의 상부로 이동시킴으로써, 기판 인식 카메라(10)는 기판(3)에 형성된 인식 마크를 촬상한다. 부품 공급부(4)와 기판 반송 기구(2) 사이의 실장 헤드(8)의 이동 경로에는, 부품 인식 카메라(11), 제1 노즐 수납부(12) 및 제2 노즐 수납부(13)가 배치되어 있다. 부품 공급부(4)로부터 부품을 취출한 실장 헤드(8)가 부품 인식 카메라(11)의 위쪽을 정해진 방향으로 통과하는 주사(走査) 동작을 실행함으로써, 부품 인식 카메라(11)는 실장 헤드(8)에 유지된 부품의 이미지를 촬상한다. 제1 노즐 수납부(12)에는, 단위 유지 헤드(9)의 노즐 홀더(9a)에 장착된 복수의 흡착 노즐(35A)이 부품종에 대응하여 수납 및 유지되어 있다. 제2 노즐 수납부(13)에는, 단위 유지 헤드(9)의 노즐 홀더(9a)에 장착된 흡착 노즐(35B)이 수납 및 유지되어 있다. 실장 헤드(8)가 제1 노즐 수납부(12) 및 제2 노즐 수납부(13)에 액세스하여 노즐 교환 작업을 실행함으로써, 단위 유지 헤드(9)에 장착된 흡착 노즐을 목적 및 대상으로 하는 부품종에 대응하여 교환할 수 있다.
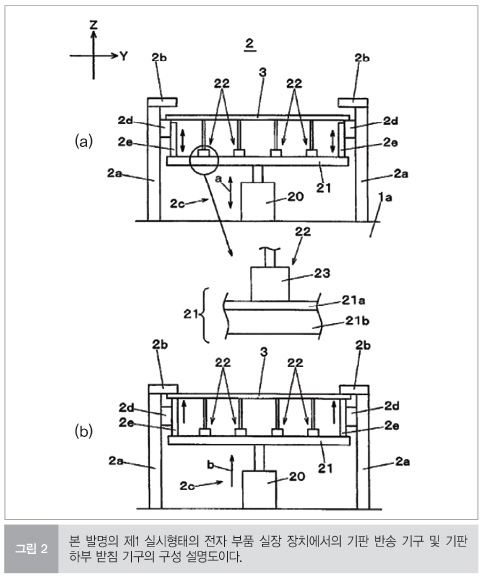
그림 2를 참조하여, 기판 반송 기구(2)의 구성 및 기능을 설명한다. 그림 2의 (a)에 도시하는 바와 같이, 기판 반송 기구(2)는 평행하게 배치된 2개의 반송 레일(2a)을 포함한다. 반송 레일(2a)의 내측에는, 컨베이어 기구(2d)가 반송 방향을 따라 마련되어 있다. 기판(3)의 양측단부를 컨베이어 기구(2d)의 상면에 접촉시킨 상태에서 컨베이어 기구(2d)를 구동함으로써, 기판(3)은 기판 반송 방향으로 반송된다. 또한, 컨베이어 기구(2d)의 내측에는, 압박 부재(2b)가 기판의 측단부를 상부로부터 압박하여 클램핑할 때, 기판의 측단부를 하측으로부터 지지하는 클램프부(2e)가 하부 받침 베이스 부(21)에 접촉하여 승강 가능하게 배치되어 있다. 기판 반송 기구(2)의 중앙부에는, 부품 실장 기구에 의한 작업 위치에 대응하여 기판 하부 받침 기구(2c)(기판 하부 받침 장치)가 배치되어 있다.
기판 하부 받침 기구(2c)는 수평한 평판의 하부 받침 베이스 부(21)를 승강 기구(20)에 의해 승강(화살표 a 참조)시키는 구성으로 되어 있다. 하부 받침 베이스 부(21)의 상면에는, 기판(3)을 하면측으로부터 지지하는 하부 받침핀 모듈(22)이 세워져 마련되어 있다. 하부 받침 베이스 부(21)는 알루미늄 등의 비자성체로 이루어진 판 부재(21b)의 상면에 강판 등의 자성체(21a)를 피복한 구성으로 되어 있다. 자성체(21a) 상의 임의의 위치에는, 하부 받침핀 모듈(22)이 하면측으로부터 지지되는 대상인 기판(3)의 하부 받침 위치에 대응하여 배치된다.
하부 받침 배치 상태에 있어서, 하부 받침핀 모듈(22)의 베이스 부(23)에 내장된 마그넷 부재(26)에 의해, 하부 받침핀 모듈(22)은 자성체(21a)와의 사이에 작용하는 인자력에 의해 하부 받침 베이스 부(21)에 고정된다. 하부 받침 베이스 부(21)의 전체를 자성 재료로 쉽게 형성할 수도 있다. 하부 받침 베이스 부(21)의 적어도 상면을 자성체로 마련할 수도 있다. 이 상태에서, 그림 2의 (b)에 도시하는 바와 같이, 승강 기구(20)를 구동하여 하부 받침 베이스 부(21)를 상승시킨다(화살표 b 참조). 이에 의해, 하부 받침핀 모듈(22)의 상단부 및 클램프부(2e)의 상단부가 기판(3)의 하면에 접촉한다. 따라서 기판(3)은 기판 하부 받침 기구(2c)에 의해 하면측으로부터 지지되고, 기판(3)의 양단부가 압박 부재(2b)의 하면에 압박되어져 위치 고정된다.
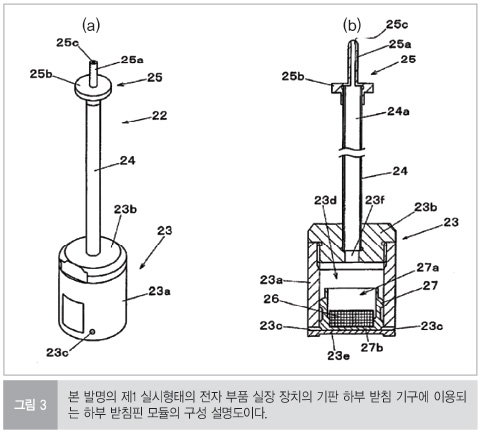
다음으로, 그림 3을 참조하여 전자 부품 실장 장치용으로 이용되는 하부 받침핀 모듈(22)의 구성 및 기능을 설명한다. 그림 3의 (a)에 도시하는 바와 같이, 하부 받침핀 모듈(22)은 상단부에 상단 부재(25)를 갖는 중공축 부재(24)가 하부 받침 베이스 부(21)에 접촉하는 베이스 부(23)로부터 위쪽으로 연장된 구성으로 되어 있다. 그림 3의 (b)에 있어서, 베이스 부(23)는 그 내부에 원통형의 승강실(23d)이 마련된 베이스 부 본체(23a)와, 승강실(23d)의 내면의 상부에 가공된 암나사부에 수나사부를 나사 결합시킨 커버 부재(23b)를 포함한다. 승강실(23d)에는, 상부가 개방된 오목부(27a)를 갖는 피스톤(27)이 상하로 미끄럼 이동 가능하게 감합되어 있다. 오목부(27a)의 하부에 마련된 바닥부(27b)의 상면측에는, 영구 자성을 갖는 마그넷 부재(26)가 고정되어 있다.
승강실(23d)은 하부에 바닥부(23e)를 갖는 바닥이 있는 형상으로 되어 있다. 통상 상태에서는, 피스톤(27)이 승강실(23d) 내에서 바닥부(23e)에 접촉하고 있다. 여기에서 바닥부(27b) 및 바닥부(23e)는 가능한 한 얇게 설정되어 있다. 이에 의해, 베이스 부(23)를 하부 받침 베이스 부(21) 상에 장착한 상태에서, 마그넷 부재(26)와 자성체(21a) 사이의 공간은 가능한 한 작게 설정되어, 마그넷 부재(26)에 의한 인자력이 자성체(21a)에 충분하게 작용한다. 베이스 부 본체(23a)에는 승강실(23d)의 하부와 외부를 연통하는 통기 구멍(23c)이 개구되어, 승강실(23d) 내에서의 피스톤(27)의 승강 작동이 승강실(23d) 내의 공기 압력에 의해 방해받게 되어 있다.
커버 부재(23b)에는 흡인 구멍(24a)을 갖는 중공축 부재(24)가 세워져 마련되어 있다. 흡인 구멍(24a)은 커버 부재(23b)에 마련된 개구부(23f)를 통하여 승강실(23d)에 연통된다. 중공축 부재(24)의 상단부에는, 위쪽으로 돌출되는 작은 직경의 접촉 핀(25a) 및 횡방향으로 연장되는 흡착용 컬러부(25b)를 포함하는 구성으로 이루어진 상단 부재(25)가 고정되어 있다. 접촉 핀(25a)의 상단부는, 하면측으로부터 기판을 지지할 때에 기판(3)의 하면에 접촉하여 기판을 지지한다. 접촉 핀(25a)에는 흡인 구멍(25c)이 상하로 관통되어 마련된다. 상단 부재(25)를 장착한 상태에서, 흡인 구멍(25c)은 흡인 구멍(24a)에 연통된다. 여기에서, 상단 부재(25)는 중공축 부재(24)의 본체와는 별개의 부품으로서 마련되어 있다. 그러나 상단 부재(25) 및 중공축 부재(24)는 일체형 부품으로서 형성될 수도 있다.
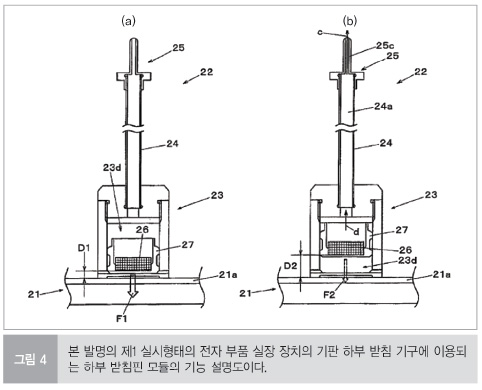
그림 4의 (a)는 하부 받침핀 모듈(22)을 단지 하부 받침 베이스 부(21) 상에 배치한 상태를 도시한다. 이 상태에서는, 피스톤(27)은 자중(自重)에 의해 승강실(23d) 내의 바닥부(23e)에 위치되어 있다. 마그넷 부재(26)의 바닥면에서부터 자성체(21a)의 상면까지의 거리(D1)는, 마그넷 부재(26)와 자성체(21a) 사이에 충분한 크기의 인자력(F1)이 작용하도록 설정되어 있기 때문에, 하부 받침 베이스 부(21)에 배치된 베이스 부(23)는, 인자력(F1)에 의해 하부 받침 베이스 부(21)에 고정된다. 이에 비하여, 그림 4의 (b)는 상단 부재(25)에 마련된 흡인 구멍(25c)으로부터 진공 흡인(화살표 c 참조)된 상태를 도시한다. 이에 의해, 흡인 구멍(24a)을 통하여 연통되는 승강실(23d)의 내부가 상부로부터 진공 배기되어, 피스톤(27)이 승강실(23d)의 위쪽으로 미끄럼 이동한다(화살표 d 참조). 그 결과, 마그넷 부재(26)의 하면과 자성체(21a)의 상면 사이의 거리(D2)는, 그림 4의 (a)에 도시된 D1으로부터 크게 증대된다. 이에 의해, 마그넷 부재(26)와 자성체(21a) 사이에 작용하는 인자력(F2)은 크게 감소되어, 하부 받침 베이스 부(21)에 대한 베이스 부(23)의 고정 상태가 해제된다. 즉, 상기한 구성을 갖는 하부 받침핀 모듈(22)은, 영구 자성을 갖는 마그넷 부재(26)를 승강 가능하게 내장하고 상기 마그넷 부재(26)가 하강한 상태에서 인자력에 의해 하부 받침 베이스 부(21)에 고정되는 베이스 부(23)와 상기 베이스 부(23)로부터 위쪽으로 연장되며 상단부가 기판(3)의 하면에 접촉하여 기판을 지지하는 축 형상부를 포함한다. 상기 베이스 부(23)는 그 내부에 마련된 승강실(23d) 내에서 마그넷 부재(26)와 함께 미끄럼 이동하여 승강되는 피스톤(27)을 포함한다. 상기 피스톤(27)과 함께 상기 마그넷 부재(26)를 하강 및 상승시킴으로써, 상기 베이스 부(23)는 상기 하부 받침 베이스 부(21)에 대하여 고정 및 고정 해제된다.
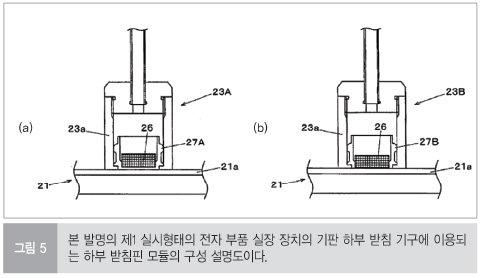
그림 5의 (a)에 도시된 베이스 부(23A)는, 그림 3의 (b)에 도시된 바닥이 있는 베이스 부(23)로부터 바닥부(23e)를 제거하고, 피스톤(27A)을 자성체(21a)에 직접 접촉시킨 것이다. 또한 그림 5의 (b)에 도시된 베이스 부(23B)는, 그림 5의 (a)에 도시된 피스톤(27A)으로부터 바닥부(27b)를 제거하고, 마그넷 부재(26) 자체를 자성체(21a)에 직접 접촉시킨 것이다. 이러한 구성을 이용함으로써, 베이스 부(23)를 보다 강한 고착력으로 하부 받침 베이스 부(21)에 고정시킬 수 있다.
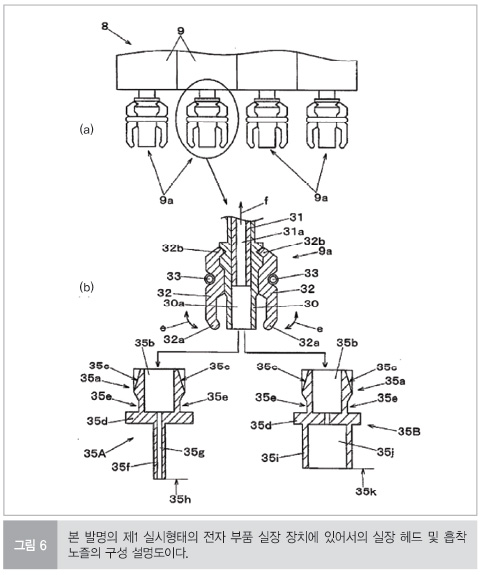
그림 6의 (a)에 도시하는 바와 같이, 실장 헤드(8)는 복수의 단위 유지 헤드(9)를 평행하게 배치한 다련형 헤드이다. 각각의 단위 유지 헤드(9)의 하부에는, 흡착 노즐을 탈착 가능하게 유지하는 기능을 갖는 노즐 홀더(9a)가 마련되어 있다. 그림 6의 (b)에 도시하는 바와 같이, 노즐 홀더(9a)는 단위 유지 헤드(9)의 본체부로부터 아래쪽으로 연장되고 진공 흡인 구멍(31a)을 갖는 슬라이드 축(31)에, 홀더 본체부(30)에 마련된 감합 구멍(30a)을 감합하여 상하로 미끄럼 이동 가능하게 하고, 홀더 본체부(30)의 양측면의 대칭 위치에 배치되는 2개의 클램프 부재(32)를 환형의 인장 스프링 부재(33)에 의해 안쪽으로 압박하는 구성으로 되어 있다. 이러한 구성에 있어서, 2개의 클램프 부재(32)의 하부 걸림 클로부(32a)에 바깥쪽으로 개방하는 방향으로 외력을 작용시킴으로써, 클램프 부재(32)는 상부 걸림 클로부(32b)를 지지점으로 하여 인장 스프링 부재(33)의 압박력에 저항하여 개방 방향으로 회전 이동된다(화살표 e 참조). 이에 의해, 흡착 노즐을 장착할 수 있다. 이 상태에서, 2개의 클램프 부재(32)의 하부 걸림 클로부(32a)는, 장착된 흡착 노즐을 인장 스프링 부재(33)의 압박력에 의해 내측으로 압박한다. 이에 의해, 흡착 노즐은 노즐 홀더(9a)에 클램핑 및 고정된다.
본 실시형태에 있어서, 흡착 대상 또는 목적에 따라, 2종류의 흡착 노즐(35A, 35B)이 적절하게 이용된다. 즉, 그림 6의 (b)에 도시된 흡착 노즐(35A)은, 기판(3)에 전자 부품을 실장하는 부품 실장 동작에서 이용되는 부품 흡착용의 흡착 노즐이다. 흡착 노즐(35B)은 기판 하부 받침 기구(2c)에서의 핀의 배치 변경시에 하부 받침핀 모듈(22)의 이동에 이용되는 핀 이동용 흡착 노즐이다.
장착부(35a)에는 노즐 홀더(9a)에 마련된 홀더 본체부(30)가 감합되는 감합 구멍(35b)이 형성되어 있다. 장착부(35a)의 하부에는 측방으로 연장되는 컬러 형상부(35d)가 마련되어 있다. 또한, 장착부(35a)에는 서로 대향하는 위치에 테이퍼면(35c)이 마련되어 있다. 노즐 착탈시에는 클램프 부재(32)가 테이퍼면(35c)을 따라 미끄럼 이동하도록 흡착 노즐에 대하여 노즐 홀더(9a)를 위치시켜 승강시킨다. 이에 의해, 클램프 부재(32)는 상부 걸림 클로부(32b)를 지지점으로 하여 개폐된다.
그림 7은 노즐 홀더(9a)에 흡착 노즐(35A, 35B)을 각각 장착하여, 각각 흡착 대상으로 하는 전자부품(P)과 하부 받침핀 모듈(22)을 흡착 및 유지하는 상태를 도시한다. 즉, 그림 7의 (a)에 도시하는 바와 같이, 흡착 노즐(35A)의 장착부(35a)를 노즐 홀더(9a)에 장착한 상태에서, 감합 구멍(35b)에 홀더 본체부(30)가 감합된다. 또한, 클램프 부재(32)의 하부 걸림 클로부(32a)가 걸림 오목부(35e)를 양측으로부터 유지하고, 인장 스프링 부재(33)의 압박력에 의해 흡착 노즐(35A)이 클램핑된다. 그리고 이 상태에서, 흡인 구멍(35g)이 감합 구멍(35b)을 통하여 진공 흡인 구멍(31a)에 연통되어, 진공 흡인 구멍(31a)으로부터 진공 흡인을 실행한다(화살표 g 참조). 이에 의해, 흡착면(35h)에 접촉하는 전자 부품(P)을 흡착 구멍(35g) 내에 부압에 의해 흡착 유지한다.
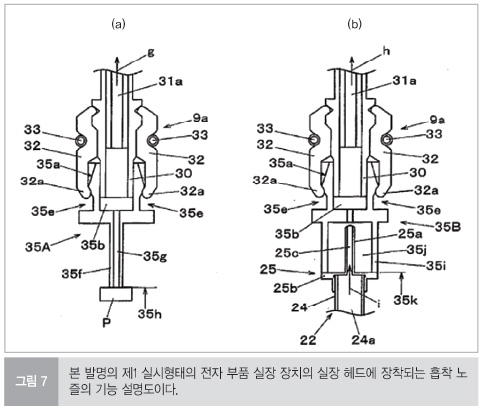
또한, 그림 7의 (b)에 도시하는 바와 같이, 흡착 노즐(35B)의 장착부(35a)를 노즐 홀더(9a)에 장착한 상태에서는, 감합 구멍(35b)에 홀더 본체부(30)가 동일하게 감합된다. 또한, 클램프 부재(32)의 하부 걸림 클로부(32a)가 걸림 오목부(35e)를 양측으로부터 유지하고, 인장 스프링 부재(33)의 압박력에 의해 흡착 노즐(35B)이 클램핑된다. 그리고 이 상태에서, 흡착 구멍(35j)은 감합 구멍(35b)을 통하여 진공 흡인 구멍(31a)에 연통된다. 그리고 진공 흡인 구멍(31a)으로부터 진공 흡인함으로써(화살표 h 참조), 하부 받침핀 모듈(22)은 흡착면(35h)에 접촉하는 흡착용 컬러부(25b)를 통하여 흡착 구멍(35j) 내의 부압에 의해 흡착 유지된다. 여기에서, 흡착부(35i)의 직경은 하부 받침핀 모듈(22)의 자중을 진공 흡인에 의해 흡착 유지 가능한 흡착 면적을 충분하게 확보할 수 있는 크기로 설정된다.
또한, 진공 흡인에 의해, 접촉 핀(25a)에 형성된 흡인 구멍(25c)을 통하여 중공축 부재(24)의 흡인 구멍(24a)이 진공 흡인된다. 이에 의해, 흡인 구멍(24a)을 통하여 베이스 부(23) 내의 승강실(23d)의 진공 흡인도 실행된다.
하부 받침핀 모듈(22)을 흡착 유지하는 흡착 노즐(35B)의 형태 및 구성에 대해서는, 본 실시형태에서의 그림 6, 그림 7에 도시된 구성 이외에도 여러 종류의 형태 및 구성이 이용될 수 있다. 즉, 접촉 핀(25a)에 형성된 흡인 구멍(25c)을 통하여 흡인 구멍(24a)의 진공 흡인을 실행할 수도 있으며, 흡착용 컬러부(25b)에 접촉하여 하부 받침핀 모듈(22)의 자중을 진공 흡인에 의해 흡착 유지하는 형태 및 구성일 수도 있다.
본 실시형태에서 도시된 전자 부품 실장 장치(1)는 전술한 바와 같이 구성된다. 다음으로, 전자 부품 실장 장치(1)에 의한 전자 부품 실장 방법에 있어서, 기판 하부 받침 기구(2c)에서 실행되는 하부 받침핀 모듈(22)의 핀 배치 변경 방법에 대해서 설명한다.
전자 부품 실장 장치(1)에 의한 전자 부품 실장 작업에 있어서, 상류측으로부터 반입된 기판(3)은, 기판 반송기구(2)의 기판 하부 받침 기구(2c)에 배치된 복수의 하부 받침핀 모듈(22)에 의해 하면측으로부터 지지 및 유지된다. 그리고 작업 대상의 기판종이 변경되는 기종 변경 작업에 있어서, 기판 하부 받침 기구(2c)에서의 하부 받침핀 모듈(22)의 수나 위치를 새로운 기판종에 대응하여 변경하는 핀 배치 변경 공정이 실행된다.
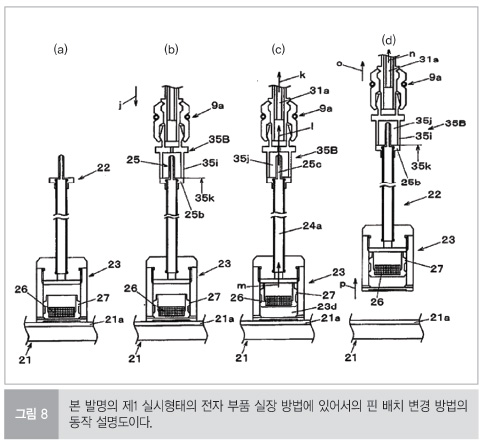
상기 핀 배치 공정에 이용되는 핀 배치 변경 방법을 그림 8을 참조하여 설명한다. 그림 8의 (a)는 하부 받침핀 모듈(22)이 하부 받침 베이스 부(21)의 정해진 위치에 배치된 상태를 도시한다. 이 상태에서, 베이스 부(23)의 승강실(23d)에 있어서 마그넷 부재(26)는 하강되어 있고, 자성체(21a)와 마그넷 부재(26) 사이에 작용하는 인자력에 의해 베이스 부(23)는 하부 받침 베이스 부(21)에 고정되어 있다.
다음으로, 그림 8의 (b), (c) 및 (d)는 배치되어 위치가 고정된 상태의 하부 받침핀 모듈(22)을 실장 헤드(8)에 의해 이동시키는 과정을 도시한다. 먼저, 1개의 단위 유지 헤드(9)의 노즐 홀더(9a)에 흡착 노즐(35A)이 장착된 실장 헤드(8)를, 위치 변경 대상인 하부 받침핀 모듈(22)의 상부로 이동시킨다. 그리고 그림 8의 (b)에 도시하는 바와 같이, 노즐 홀더(9a)에 장착된 흡착 노즐(35B)을, 하부 받침핀 모듈(22)의 상단 부재(25)에 대하여 하강시켜(화살표 j 참조), 흡착부(35i)의 하단부의 흡착면(35k)을 흡착용 컬러부(25b)의 상면에 접촉시킨다.
이에 의해, 흡착면(35k)을 시일링하여 흡착 구멍(35j) 내를 밀폐한다. 이 상태에서, 그림 8의 (c)에 도시하는 바와 같이, 진공 흡인 구멍(31a)으로부터 진공 흡인을 실시함으로써(화살표 k 참조), 흡착 구멍(35j) 및 흡인 구멍(25c)을 통하여 흡인 구멍(24a)이 진공 흡인된다(화살표 l 참조). 이에 의해, 흡인 구멍(24a)을 통하여 승강실의 압력이 감소되어 피스톤(27)은 마그넷 부재(26)와 함께 승강실(23d) 내에서 상승한다(화살표 m 참조). 이 상승 동작에 따라, 마그넷 부재(26)는 하부 받침 베이스 부(21)의 자성체(21a)로부터 이격되어, 마그넷 부재(26)와 자성체(21a) 사이에 작용하는 인자력이 감소된다. 따라서 베이스 부(23)의 하부 받침 베이스 부(21)에 대한 고정 상태가 해제된다. 이와 같이, 베이스 부(23)의 하부 받침 베이스 부(21)에 대한 고정을 해제한 상태에서, 하부 받침핀 모듈(22)이 이동된다. 즉, 그림 8의 (d)에 도시하는 바와 같이, 진공 흡인 구멍(31a)으로부터의 진공 흡인을 계속적으로 실행하여(화살표 n 참조) 흡착 구멍(35j)의 압력을 감소시킨 상태에서, 실장 헤드(8)에서 단위 유지 헤드(9)의 노즐 홀더(9a)를 상승시킨다(화살표 o 참조). 이때에, 하부 받침 베이스 부(21)에 대한 베이스 부(23)의 고정 상태가 해제되어 있기 때문에, 흡착 노즐(35B)에는 하부 받침핀 모듈(22)의 자중만이 흡착 하중으로서 작용한다.
흡착 노즐(35B)에 있어서, 흡착부(35i)의 직경은 하부 받침핀 모듈(22)의 자중을 진공 흡인에 의해 충분하게 흡착 유지 가능하게 설정되어 있기 때문에, 하부 받침핀 모듈(22)은 상승하고(화살표 p 참조), 하부 받침 베이스 부(21)로부터 떨어진다. 그리고 상기한 바와 같이 분리된 하부 받침핀 모듈(22)을 새로운 위치에 배치할 때에는, 흡착 노즐(35B)에 의해 하부 받침핀 모듈(22)을 흡착 유지한 단위 유지 헤드(9)를 원하는 위치에 이동시킨다. 그리고 흡착 노즐(35B)을 하강시켜 흡착 유지된 하부 받침핀 모듈(22)의 베이스 부(23)를 하부 받침 베이스 부(21)에 접촉시킨다. 그리고 진공 흡인 구멍(31a)으로부터 진공 흡입을 해제하여, 베이스 부(23)의 승강실(23d) 내에서 마그넷 부재(26)를 피스톤(27)과 함께 하강시킨다. 이에 의해, 마그넷 부재(26)와 자성체(21a) 사이에 인자력이 작용하여, 베이스 부(23)는 하부 받침 베이스 부(21)에 고정된다. 즉, 상기한 핀 배치 변경 방법에 있어서, 하부 받침핀 모듈(22)을 흡착 노즐(35A)에 의해 유지하고 실장 헤드(8)를 이동시킨다. 이에 의해, 하부 받침 베이스 부(21)에 하부 받침핀 모듈을 배치하는 핀 배치 공정에 있어서, 베이스 부(23)를 하부 받침 베이스 부(21)에 접촉시켜 마그넷 부재(26)를 하강시킴으로써, 인자력에 의해 베이스 부(23)를 하부 받침 베이스 부(21)에 고정한다. 그리고 하부 받침핀 모듈(22)을 흡착 노즐(35B)에 의해 유지하여 실장 헤드(8)를 이동시킨다. 이에 의해, 하부 받침 베이스 부(21)로부터 베이스 부(23)를 분리하는 핀 분리 공정에 있어서, 중공축 부재(24) 및 상단 부재(25)를 포함하는 축 형상부에 마련되고 상단부에서 개구되며 승강실(23d)에 연통되는 흡인 구멍(24a, 25c)으로부터 흡착 노즐(35B)에 의해 진공 흡인을 실행한다. 이에 의해, 피스톤(27)과 함께 마그넷 부재(26)를 상승시켜, 베이스 부(23)를 하부 받침 베이스 부(21)로부터 이격시킨다. 이에 의해, 마그넷 부재(26)와 자성체(21a) 사이의 인자력을 감소시켜, 베이스 부(23)를 하부 받침 베이스 부(21)로부터 고정 해제한다.
전술한 바와 같이, 본 실시형태에 기재된 전자 부품 실장 장치용의 하부 받침핀 모듈(22) 및 기판 하부 받침 기구(2c)에 있어서는, 적어도 상면이 자성체(21a)로 마련된 하부 받침 베이스 부(21)의 임의의 위치에 세워져 마련되어 기판(3)을 하면측으로부터 지지하는 전자 부품 실장 장치용의 하부 받침핀 모듈(22)을 포함한다. 하부 받침핀 모듈(22)은, 영구 자성을 갖는 마그넷 부재(26)를 승강 가능하게 내장하고 마그넷 부재(26)가 하강한 상태에서 인자력에 의해 하부 받침 베이스 부(21)에 고정되는 베이스 부(23)와, 베이스 부(23)로부터 위쪽으로 연장되며 상단부가 기판(3)의 하면에 접촉하여 기판을 지지하는 중공축 부재(24)를 포함한다. 이에 의해, 마그넷 부재(26)를 하강 및 상승시킴으로써, 베이스 부(23)를 하부 받침 베이스 부(21)에 대하여 고정 및 고정 해제할 수 있다. 따라서 심플한 구성에 의해 핀 배치 변경 작업을 효율적으로 자동화할 수 있다.







