조명계의 능력 향상시키는 구조
관찰 대상의 표면 기울기각 대응 범위 확대
전자 부품 장착 장치(마운터)의 부품 인식 카메라에 의한 촬상 화상은, 통상 부품 리드 선단부가 비친 것이지만, 리드 선단의 기울기가 크면 리드 선단부가 촬상 화상에 비치지 않아, 흡착 자세 산출시의 화상 처리에 의해 부품 인식 에러가 발생한다고 하는 문제가 발생한다. 본 발명에서는, 부품 인식 카메라의 결상계 시야 밖의 영역에만 조명용 렌즈, 혹은 보조 광원을 설치하고, 종래 광학계에서는 부품 표면까지 도달하지 않은 각도의 조명광을 부품 표면으로 유도함으로써, 관찰 대상의 표면 기울기각에의 대응 범위를 확대하여, 결상계 시야 밖의 영역에만 렌즈, 광원을 설치함으로써, 결상계에는 영향을 미치는 일이 없이 조명계의 능력을 향상시키는 것을 가능하게 하였다.
배경 기술
전자 부품 장착 장치(마운터)는, 부품 공급부로부터 공급되는 전자 부품을 장착 헤드부의 흡착 노즐로 흡착하여, 반송되어 오는 회로 기판 상에 실장한다. 그때, 조명 장치로부터 사출되는 광을 흡착한 부품에 조사하여 부품 인식 카메라에 의해 촬상하고, 화상 처리에 의해 부품의 흡착 자세(흡착 중심과 부품 중심의 어긋남, 흡착 각도의 어긋남)를 산출 후, 흡착 자세를 보정하여 회로 기판 상의 소정 위치에 실장한다. 이때의 조명 방법은, QFP(Quad Flat Package), SOP(Small Outline Package)와 같은 리드 전극을 갖는 경우, 리드부를 빛나게 하도록 동축 조명에 의해 수직 방향으로부터 조명하고, BGA(Ball Grid Array)와 같은 범프 전극을 갖는 경우, 사방(斜方) 조명에 의해 경사 방향으로부터 조명을 행하고 있다.
QFP나 SOP와 같은 다수의 리드 전극을 갖는 전자 부품을 기판 상에 실장하는 전자 부품 실장 장치에서는, 부품 공급부로부터 공급되어 오는 전자 부품을 헤드부의 흡착 노즐에 의해 흡착하여, 반송되어 오는 회로 기판 상에 실장한다. 그 경우, 흡착 부품을 부품 인식 카메라에 의해 촬상하고, 화상 처리에 의해 부품의 흡착 자세(흡착 중심과 부품 중심의 어긋남, 흡착 각도의 어긋남)를 산출 후, 흡착 자세를 보정하여 회로 기판 상의 소정 위치에 실장한다. 이때 조명에 의해 빛이 나는 다수의 리드 전극을 부품 인식 카메라에 의해 촬상하여 촬상 화상을 얻어, 이 빛이 나는 다수의 리드 위치로부터 흡착 자세의 산출을 행하지만, 이 다수의 리드 전극의 선단은 반드시 전부가 동일한 평면 내에 있는 것은 아니며, 일부의 리드 전극이 다른 리드 전극에 대해 기울어져 성형되어 있는 경우가 있다. 이 기울기각이 크면, 부품 인식 카메라에 의해 촬상하였을 때에 이 기울어져 성형된 리드 전극의 선단 부분이 빛나지 않아, 촬상한 화상으로부터 흡착 노즐에 의해 흡착된 전자 부품의 자세를 산출할 때에, 부품 인식 에러를 발생해 버리는 경우가 있다. 즉, 리드 전극의 표면에서 반사된 조명광을 부품 인식 카메라에 도달시키기 위해서는, 일부의 리드 전극의 표면의 기울기각이 커지는 것에 수반하여, 리드 전극 표면으로의 조명광의 입사각의 범위도 크게 할 필요가 있다.
발명의 내용
과제의 해결 수단
본 발명에서는, 부품 인식부의 결상계 시야 밖의 영역에만 조명용 렌즈, 혹은 보조 광원을 설치하여, 종래 광학계에서는 조사할 수 없었던 조명 각도로 부품을 조명함으로써, 관찰 대상의 표면 기울기각(리드 선단 기울기각)에의 대응 범위를 확대할 수 있도록 하였다. 그 결과, 결상계 시야 밖의 영역에만 렌즈, 광원을 설치하므로, 결상계에는 영향을 미치는 일이 없이 조명계의 능력을 향상시키는 것을 가능하게 하였다. 즉, 상기 목적을 달성하기 위해 본 발명에서는 전자 부품을 공급하는 부품 공급부와, 부품 공급부로부터 공급된 전자 부품을 보유 지지하는 부품 보유 지지 수단과, 부품 보유 지지 수단에 의해 보유 지지된 전자 부품을 촬상하는 촬상 수단과, 촬상 수단에 의해 촬상하여 얻어진 전자 부품의 부품 보유 지지 수단에 보유 지지된 자세를 보정하는 부품 자세 보정 수단과, 부품 자세 보정 수단에 의해 자세가 보정된 전자 부품을 기판 상의 소정의 위치로 반송하여 장착하는 부품 장착 수단을 구비한 전자 부품을 기판 상의 소정의 위치에 실장하는 장치에 있어서, 촬상 수단은, 부품 보유 지지 수단에 보유 지지된 전자 부품에 렌즈를 통해 조명광을 조사하는 광 조사부와, 광 조사부에 의해 광이 조사된 전자 부품으로부터의 반사광에 의한 상을 렌즈를 통해 촬상하는 촬상부를 갖고, 광 조사부는, 렌즈를 통해 렌즈의 중앙부와 주변부에서 전자 부품에 대해 다른 입사 각도로 조명광을 조사하도록 하였다. 또한, 상기 목적을 달성하기 위해, 본 발명에서는, 전자 부품을 공급하는 부품 공급부와, 부품 공급부로부터 공급된 전자 부품을 보유 지지하는 부품 보유 지지 수단과, 부품 보유 지지 수단에 의해 보유 지지된 전자 부품을 촬상하는 촬상 수단과, 촬상 수단에 의해 촬상하여 얻어진 전자 부품의 부품 보유 지지 수단에 보유 지지된 자세를 보정하는 부품 자세 보정 수단과, 부품 자세 보정 수단에 의해 자세가 보정된 전자 부품을 기판 상의 소정의 위치로 반송하여 장착하는 부품 장착 수단을 구비한 전자 부품을 기판 상의 소정의 위치에 실장하는 장치에 있어서, 촬상 수단은, 부품 보유 지지 수단에 보유 지지된 전자 부품에 렌즈를 통해 조명광을 조사하는 광 조사부와, 광 조사부에 의해 광이 조사된 전자 부품으로부터의 반사광에 의한 상을 렌즈를 통해 촬상하는 촬상부를 갖고, 렌즈의 표면은 중앙부에 대해 주변부가 작은 곡률 반경을 갖고, 광 조사부는, 렌즈를 통해 렌즈의 중앙부와 주변부에서 전자 부품에 대해 다른 입사 각도로 조명광을 조사하도록 하였다.
또한, 본 발명에서는 부품 공급부로부터 공급된 전자 부품을 보유 지지 수단에 의해 보유 지지하고, 보유 지지 수단에 의해 보유 지지된 전자 부품을 촬상하고, 촬상하여 얻어진 전자 부품의 화상에 기초하여 전자 부품의 자세를 보정하고, 자세가 보정된 전자 부품을 기판 상의 소정의 위치로 반송하여 기판에 장착하는 전자 부품의 실장 방법에 있어서, 보유 지지 수단에 의해 보유 지지된 전자 부품을 촬상하는 스텝에 있어서, 렌즈를 통해 렌즈의 중앙부와 주변부에서 전자 부품에 대해 다른 입사 각도로 조명광을 조사하고, 조명광이 조사된 전자 부품으로부터의 반사광에 의한 상을 렌즈를 통해 촬상하도록 하였다.
발명의 효과
본 발명에 따르면, 리드 전극 선단의 기울기 각도의 편차에의 대응력을 향상시킨 전자 부품 실장 장치를 실현할 수 있었다. 또한, 전자 부품 표면의 기울기각에 대한 대응 범위를 확대하는 것이 가능해지고, 부품 인식 화상의 질이 향상되어, 부품 인식시의 전자 부품 장착 장치의 부품 인식률 향상(인식 에러의 저감)에 기여한다고 하는 효과를 얻을 수 있게 되었다.
본 발명의 이러한 특징 및 장점은 첨부 도면에 도시된 바와 같이, 본 발명의 양호한 실시예에 대한 이후의 보다 상세한 설명으로부터 명백해질 것이다.
발명을 실시하기 위한 구체적인 내용
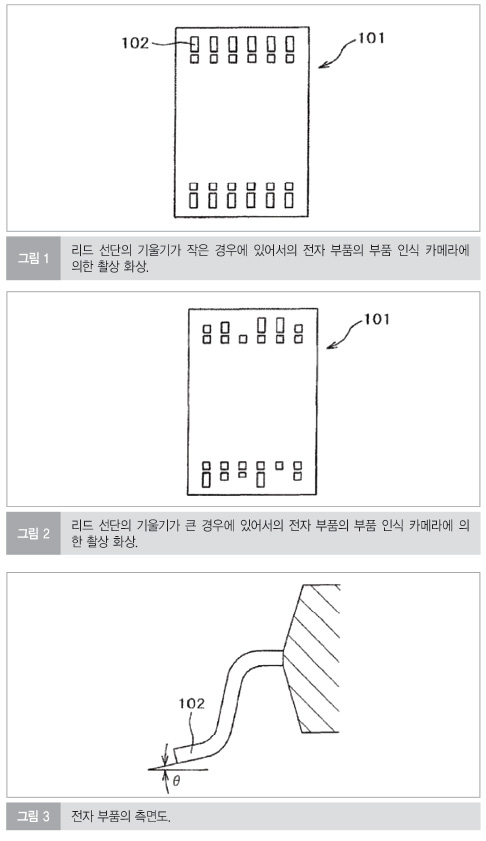
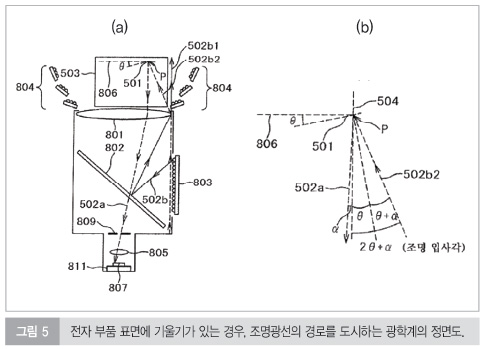
이하, 본 발명에 의한 전자 부품 장착 장치의 실시예를 도면을 사용하여 설명한다. 그림 1에 전자 부품 장착 장치의 부품 인식 카메라에 의해 전자 부품을 촬상하여 얻은 화상(101)을 도시한다. 전자 부품을 촬상하여 얻은 화상(101)은, 통상 조명광에 의해 부품 리드 선단부(102)가 비친 화상으로, 화상 상의 리드 선단부(102)의 위치로부터 상술한 흡착 자세의 산출을 행할 수 있다. 그러나 실제로는 리드 선단부에 기울기 각도(그림 3에 있어서의 θ)의 편차가 존재하는 것이 알려져 있고, 이 기울기 각도의 편차가 크면, 하나의 촬상 화면 중에 모든 리드 선단부로부터의 정반사광에 의한 상을 찍는 것이 어려워져, 그림 2에 도시하는 바와 같이 일부의 리드 선단부가 비치지 않게 되어 버린다고 하는 문제가 발생한다.
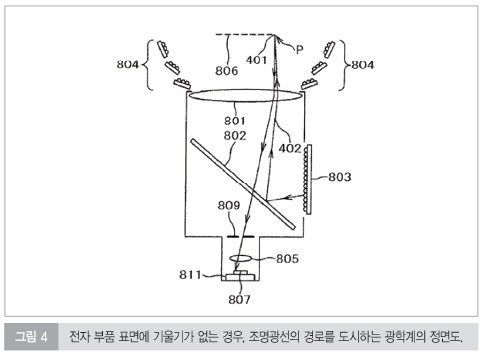
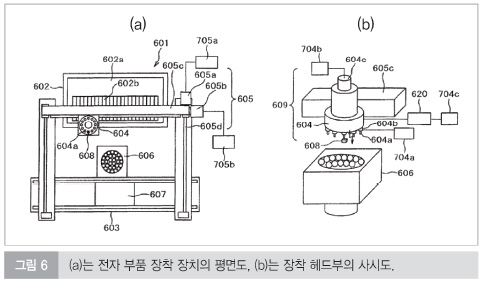
그림 4 및 그림 5는 각각 부품 표면의 P점이 기울기각을 갖지 않는 경우와 갖는 경우에 있어서, P점에서 반사된 광선이 촬상면에 도달하는 경로를 도시하고 있다. 부품 표면은 대략 경면체(P점에 있어서의 광의 입사각과 반사각은 동등함)로, P점에서 반사된 조명광에 의해 촬상면에 도달하는 광은, 결상계의 구성으로부터 각각 도면에 도시되는 경로를 취하는 것으로 한다.
부품 표면의 P점이 기울기각을 갖지 않는 그림 4의 경우, 촬상면(807)에 도달하는 광선(402)을 촬상면(807)으로부터 거꾸로 거슬러 올라가면, 조명 광원(803)으로부터 사출되어 있는 것을 알 수 있다. 이것으로부터, 조명 광원(803)으로부터 사출되어 하프 미러(802)에서 일부가 반사되어 대물 렌즈(801)를 투과하여 리드 전극(401)의 P점에서 반사된 광 중, 다시 물체측 렌즈(801)를 투과하여 하프 미러(802)를 투과한 광이 촬상면(807)에 도달하고 있는 것을 확인할 수 있다.
한편, 부품 표면의 P점이 기울기각을 갖는 그림 5의 경우, 촬상면(807)에 도달하는 광선(502a)(점선의 광로)을 촬상면(807)으로부터 거꾸로 거슬러 올라가면, 물체측 렌즈(801)로부터 벗어나 버려 조명 광원(803)에 도달하지 않는다. 실제로 조명 광원(803)으로부터 사출된 광 중 대물 렌즈의 가장 끝에 입사되는 광선(502b)(실선의 광로)은, 물체측 렌즈(801)에 의한 굴절이 충분하지 않으므로, P점까지 도달할 수 없는 것을 알 수 있다. 이것은 광원(803)으로부터 발사되어 하프 미러(802)에서 반사되어 물체측 렌즈(801)를 투과하여, P점에서 정반사된 조명광 중에서, 촬상면(807)에 도달하는 광은 존재하지 않는 것을 나타내고 있다.
또한, 그림 5의 (b)에는, 그림 5의 (a)의 부호 503(점선으로 둘러싸인 영역)의 확대도를 도시하지만, 부품 흡착면(806)에 수직한 축(504)에 대해 각도 α의 방향으로 반사된 광선(502a)이 촬상면(807)에 도달하는 경우, 상기 광선(502a)의 부품 표면 P점(표면 기울기각 θ)에의 입사각은(2θ+α)로 된다. 즉, 부품 표면의 P점에서 반사된 조명광이 촬상면(807)에 도달하기 위해서는, 부품 표면의 P점의 기울기각에 비례하여, 부품 표면 P점에의 조명광(502b)의 입사각도 크게 할 필요가 있다. 이로 인해, 리드 선단부의 기울기각이 큰 경우, 부품 표면으로의 조명광의 입사각이 상기 조건을 만족시키지 않아, 리드 선단부가 촬상 화상에 비치지 않게 되어 버린다. 이러한 경우, 흡착 자세 산출의 화상 처리 에러로 되어 버리므로, 부품 인식부에 있어서는, 리드 선단 기울기에의 대응력 향상이 요구되게 된다.
본 발명은, 이 리드 선단 기울기에의 대응력을 향상시킨 조명 광학계를 구비한 전자 부품 장치 제공에 관한 것이다.
이하에, 본 발명의 실시예를, 도면을 사용하여 설명한다. 그림 6의 (a)는 전자 부품 장착 장치의 평면도를 도시하고 있다. 전자 부품 장착 장치(601)는, 각종 전자 부품을 공급하는 부품 공급부(602), 프린트 기판(607)을 반송ㆍ위치 결정하는 반송부(603), 전자 부품(608)을 흡착하여 프린트 기판 상에 장착하는 장착 헤드부(604), 장착 헤드부의 구동을 행하는 장착 헤드 구동부(605), 전자 부품(608)의 장착 헤드에의 흡착 상태를 인식하는 부품 위치 인식부(606)를 갖고 있다. 상기 부품 공급부(602)는 전자 부품 장착 장치의 장치 본체에 장착되는 피더 베이스(602a)와 피더 베이스(602a) 상에 복수 설치되고, 각종 전자 부품(608)을 각각 그 부품 취출부(부품 흡착 위치)에 1개씩 공급하는 부품 공급 유닛(602b)군으로 구성된다.
상기 반송부(603)는 상류로부터 프린트 기판(607)을 받고, 상류로부터 받은 프린트 기판(607)을 위치 결정부로 반송하고, 위치 결정부에 위치 결정된 프린트 기판 상에 전자 부품(608)이 장착된 후, 기판을 하류로 배출한다. 그림 6의 (b)는 전자 부품 장착 장치에 있어서의 장착 헤드부(604)의 사시도를 도시하고 있다. 상기 장착 헤드부(604)는 전자 부품을 흡착하는 흡착 노즐(604a)을 복수 구비하고, 이 복수의 흡착 노즐(604a)을 개별로 상하 이동시키기 위한 각 흡착 노즐(604a)에 대응한 상하축 모터(604b), 복수의 흡착 노즐(604a)을 연직축 주위로 회전시키기 위한 θ축 모터(604c)를 구비하고, 각 흡착 노즐(604a)은 X축 가이드(605c)를 따른 X축 방향, Y축 가이드(605d)를 따른 Y축 방향으로의 이동에 더하여, θ축 모터(604c)에 의해 구동되는 연직축 주위의 회전, 또한 상하축 모터(604b)에 의해 구동되는 상하 이동이 가능하게 되어 있다.
또한, 장착 헤드부(604)는, X축 구동 모터(605a), Y축 구동 모터(605b)에 의해 X축의 가이드(605c) 및 Y축의 (605d)을 따라 이동이 가능하게 되어 있고, 부품 공급부(602)로부터 공급된 전자 부품(608)을 흡착 노즐(604a)에 의해 흡착한 후, 위치 결정부에 의해 위치 결정된 프린트 기판(607) 상으로 이동하여, 전자 부품을 프린트 기판(607)에 실장한다.
상기 장착 헤드 구동부(605)는, X축의 구동 모터(605a), Y축의 구동 모터(605b) 및 X축의 구동 가이드(605c), Y축의 구동 가이드(605d)를 구비하여 구성되고, XY 평면 내에 있어서의 장착 헤드부(604)의 구동을 행한다.
상기 부품 위치 인식부(606)는 조명 광원을 포함하는 조명 광학계(810) 및 부품 촬상용 카메라(결상 광학계)(820)를 구비하여 구성되고, 전자 부품(608)을 상기 흡착 노즐(604a)에 흡착하였을 때, 상기 전자 부품(608)이 흡착 노즐(604a)의 중심에 대해 어느 정도 위치가 어긋나 흡착 유지되어 있는지를 인식하기 위해 전자 부품(608)의 촬상을 행한다.
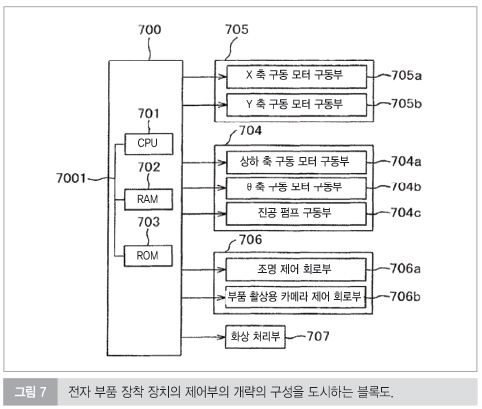
그림 7은 본 장치의 제어부의 구성을 도시하는 블록도이다. 부호 700은 중앙 제어부로, CPU(701), RAM(702), ROM(703)을 구비하고 있다. CPU(701)는 본 장치의 장착에 관한 동작을 통괄 제어한다. CPU(701)에는 버스 라인(7001)을 통해, 부품 장착에 관한 장착 데이터가 저장된 RAM(랜덤·액세스·메모리)(702), 프로그램이 저장된 ROM(리드·온리·메모리)(703)에 접속되어 있다. 그리고 중앙 제어부(700)의 CPU(701)는 상기 RAM(702)에 기억된 데이터에 기초하여, 상기 ROM(703)에 저장된 프로그램에 따라서, 전자 부품 장착 장치(601)의 부품 장착 동작에 관한 동작을 제어한다. 즉, CPU(701)는 X축 Y축 모터 제어부(705)를 통해 X축 구동 모터 구동부(705a)에 의해 구동되는 X축 구동 모터(605a), Y축 구동 모터 구동부(705b)에 의해 구동되는 Y축 구동 모터(605b)를 제어한다. 또한 CPU(701)는 모터·진공 펌프 제어부(704)를 통해 장착 헤드의 상하축 구동 모터 구동부(704a)에 의해 구동되는 상하축 구동 모터(604b), 장착 헤드의 θ 구동 모터 구동부(704b)에 의해 구동되는 θ 구동 모터(604c), 진공 펌프 구동부(704c)에 의해 구동되는 전자 부품(608)의 흡착을 ON/OFF하는 진공 펌프(620)를 제어한다. 또한, CPU(701)는 카메라ㆍ조명 제어부(706)를 통해 조명 제어 회로부(706a)에 의해 작동하는 조명 광원부(810), 부품 촬상용 카메라 제어 회로부(706b)에 의해 작동하는 촬상 소자(811)를 제어한다. 또한, CPU(701)는 촬상 소자(811)로부터의 화상 신호를 받아 부품 인식 처리를 행하는 화상 처리부(707)의 제어를 행한다.
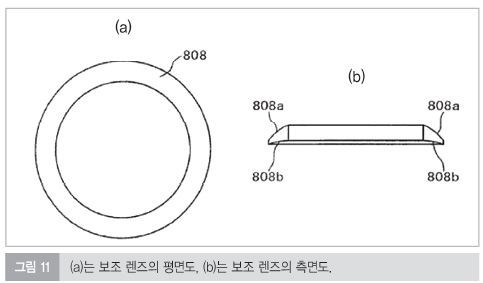
다음에, CPU(201)는 RAM(702)에 저장되어 있는 장착 데이터를 판독하고(S1002), 흡착 노즐(604a)에 의해 장착해야 할 전자 부품(608)을 소정의 피더(602b)로부터 흡착하여 취출한다(S1003). 그때, 구동 회로에 의해 상하축 모터(706)가 구동되어, 상기 각 흡착 노즐(604a)이 하강하여 부품을 흡착하여 취출한다.
다음에, 구동 회로에 의해 상하축 모터(604b)가 구동되어 흡착 노즐(604a)이 상승하여, 장착 헤드(604)는 X축 구동 모터(605a), Y축 구동 모터(605b)에 의해 프린트 기판의 상방 위치로 이동 개시한다(S1004). 이 이동 도중에, 상기 부품 위치 인식부(606) 상방 위치에 있어서, 전자 부품(608)을 촬상하고(S1005), 상기 촬상된 화상을 기초로 화상 처리부(707)가 인식 처리를 행함으로써, 전자 부품(608)이 흡착 노즐(604a)에 대해 어느 정도 위치가 어긋나 흡착 유지되어 있는지가 인식된다(S1006).
상기 인식된 위치 어긋남 량은 CPU로 보내지고, 이것에 기초하여, RAM(702)에 저장된 장착해야 할 XY 좌표 위치, 연직 축선 주위로의 회전 각도 위치에 보정을 행한다(S1007). 즉, 부품의 XY 방향의 위치 어긋남은 X축 모터(605a), Y축 모터(605b)에 의해 보정하고, 부품의 회전 어긋남은 θ축 모터(604c)에 의해 보정함으로써, 부품을 탑재 위치에 장착한다(S1008). 이상을 장착 데이터에 기록된 부품 전부에 대해 순차 실행하고(S1009), 모든 부품의 탑재를 종료하면 프린트 기판(607)을 반송부(603)에 의해 하류측 장치로 반송한다.
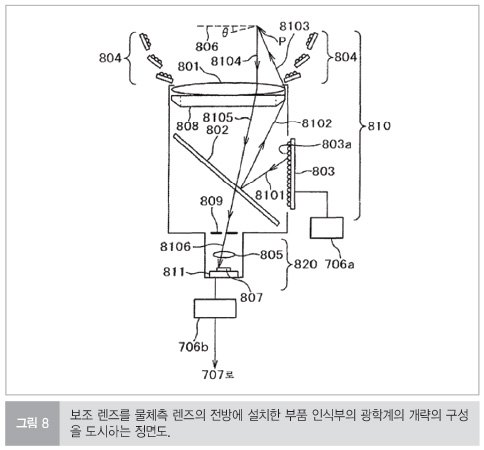
다음에, 본 발명에 있어서의 부품 위치 인식부(606)의 광학계에 대해, 그림 8을 사용하여 상세하게 설명한다. 상기 광학계는 크게, 물체측 렌즈(801), 하프 미러(802), 조명 광원부(810)[동축 조명 유닛(803), 사방 조명 유닛(804)], 부품 인식 카메라(820)를 구비하여 구성되고, 조명광이 조사된 물체면(806) 상의 전자 부품(608)의 표면으로부터의 반사광이 하프 미러(802)를 통과하여, 카메라 렌즈(805)를 통해 촬상 소자(807) 상에 결상됨으로써 전자 부품(608)의 상을 촬상한다. 상기 조명 광원부(810)는 동축 조명 유닛(803) 및 사방조명 유닛(804)의 조합에 의해 구성된다.
동축 조명 유닛(803)은 다수의 LED(803a)가 동일면 내에 배열된 구성으로, 동축 조명 유닛(803)으로부터 사출된 광의 절반이 하프 미러(802)에 의해 반사된 후, 물체측 렌즈(801)를 통해 물체면(806) 상에 있는 전자 부품(608)에 조사된다. 또한, 사방 조명 유닛(804)은 물체측 렌즈(801)와 물체면(806)의 공간에 다수의 LED(804a)가 복수단에 걸쳐 동심원 형상으로 배열된 구성으로 하고, 사방 조명용 LED(804a)로부터 사출된 광은, 전자 부품에 대해 경사 방향으로부터 조사된다.
또한, 본 실시예에서는 물체측 렌즈(801)에 인접하는 결상계 시야 밖의 범위에만 동축 조명용 보조 렌즈(808)를 물체측 렌즈(801)의 전방(물체에 가까운 쪽), 혹은 물체측 렌즈(801)의 후방(촬상 소자에 가까운 쪽)에 설치한다. 보조 렌즈(808)를 설치하는 목적은, 그림 5에서 P점으로 유도할 수 없었던 동축 조명광을 P점으로 유도하는 것이고, 보조 렌즈를 결상계 시야 밖의 범위에만 설치하는 이유는, 보조 렌즈가 결상계에 영향을 미치는 일 없이, 상기 목적으로만 기능시키기 위해서이다.
보조 렌즈(808)를 물체측 렌즈(801)의 전방에 설치한 구성을 그림 8에 도시한다. 그림 8의 구성에 있어서, 동축 조명 유닛(803)의 다수의 LED(803a) 중 하나인 LED(803a1)로부터 발사된 광선(8101)은 하프 미러(802)에서 광량의 절반이 반사되어 광선(8102)으로서 보조 렌즈(808)를 투과하고, 다음에 물체측 렌즈(801)를 투과하여 광선(8103)으로 되어 물체면(806)에 있어서 흡착 노즐(604a)에 의해 기울기각(θ)으로 흡착되어 있는 전자 부품(608)의 P점에 입사한다. P점으로부터는 반사광(8104)이 발생하여 물체측 렌즈(801)를 투과하여 광선(8105)으로 되어, 하프 미러(802)에 입사한다. 하프 미러(802)에서는 입사한 광선(8105)의 광량의 절반이 투과하여 광선(8106)으로 되어, 미광(迷光)을 차단하기 위한 조리개(809)를 통과하여 카메라 렌즈(805)에 의해 촬상 소자(811)의 수광면(807) 상에 결상된다. 물체측 렌즈(801)는 투과한 광선(8105) 중하프 미러(802)를 투과한 광선(8106)이, 조리개(809)의 위치에 집광되도록 조정되어 있다.
상기한 바와 같이, 동축 조명 유닛(803)으로부터 발사되어 하프 미러(802)에서 반사된 광선(8102)은, 보조 렌즈(808)와 물체측 렌즈(801)의 2매의 렌즈를 통과하여 광선(8103)으로 되므로, 그림 5의 (a)에 도시한 물체측 렌즈(801)만을 통과한 광선(502b1)(실선의 광로)과 비교하여 크게 굴절하여, 종래는 조사할 수 없었던 큰 입사각의 조명광(그림 5의 (b)에 점선의 광로(502b2)로 나타내는 입사각의 조건을 만족시키는 조명광)을 전자 부품(608)의 표면에 조사할 수 있게 된다. 이 결과, 그림 5와 동일한 표면 기울기를 갖는 P점으로부터의 반사광을 촬상 소자의 촬상면(807)에 도달시키는(조명광에 의해 P점을 빛나게 하는) 것이 가능해진다.
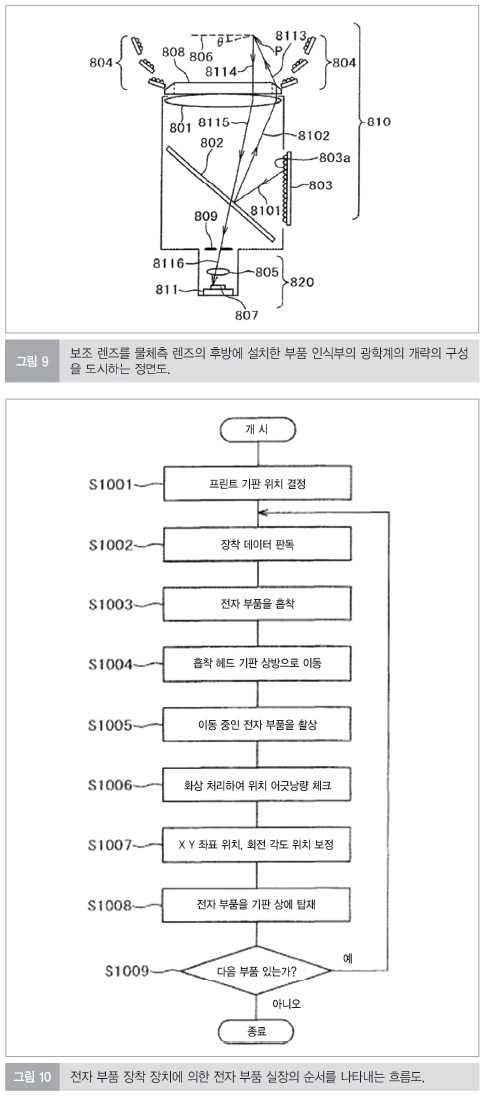
그림 9에 도시한 구성에 있어서도, 그림 8의 경우와 마찬가지로, 동축 조명 유닛(803)의 다수의 LED(803a) 중 하나인 LED(803a1)로부터 발사된 광선(8101)은 하프 미러(802)에서 광량의 절반이 반사되어 광선(8102)으로서 물체측 렌즈(801)를 투과하고, 다음에 보조 렌즈(808)를 투과하여 광선(8113)으로 되어 물체면(806)에 있어서 흡착 노즐(604a)에 의해 기울기각(θ)으로 흡착되어 있는 전자 부품(608)의 P점에 입사한다. P점으로부터는 반사광(8114)이 발생하여 물체측 렌즈(801)를 투과하여 광선(8115)으로 되어, 하프 미러(802)에 입사하고, 광량의 절반이 투과하여 광선(8116)으로 되어, 조리개(809)를 통과하여 카메라 렌즈(805)에 의해 촬상 소자(811)의 수광면(807) 상에 결상된다.
보조 렌즈(808)의 형상에 대해 그림 10과 그림 11을 사용하여 설명한다. 그림 10의 (a)는 보조 렌즈(808)의 상면도, 그림 11의 (b)에는 보조 렌즈(808)의 측면도를 도시한다. 보조 렌즈(808)는, 상술한 바와 같이 물체측 렌즈(801)와 카메라 렌즈(805)로 구성되는 결상계의 시야 밖의 범위에만 설치하므로, 결상계의 시야가 원형인 경우, 그림 11의 (a)에 도시하는 바와 같이 보조 렌즈(808)의 상면도는 환 형상으로 한다. 또한, 그림 11의 (b)에 있어서의 808a면, 808b면은, 본 보조 렌즈(808)와 물체측 렌즈(801)에서 굴절된 동축 조명광이, 그림 5의 (b)에 도시하는 입사각으로 되는 곡률 반경의 조합으로 한다. 또한, 그림 8 및 그림 9의 예에서 도시한 물체측 렌즈(801)와 보조 렌즈(808)를 각각 배치하는 구성 외에, 물체측 렌즈(801)와 보조 렌즈(808)를 일체화하여 1매의 물체측 렌즈로서 치환하는 것도 가능하다. 이때의 일체화한 물체측 렌즈(1201)의 상면도를 그림 12의 (a)에, 또한 측면도를 그림 12의 (b)에 도시한다.
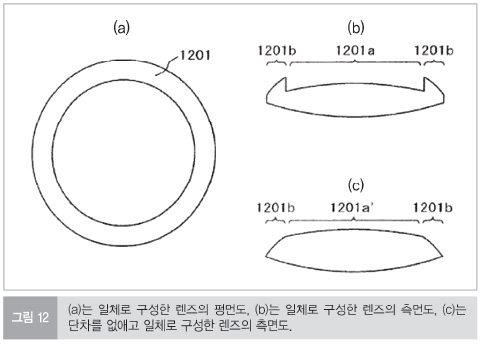
일체화한 물체측 렌즈(1201)의 형상은, 그림 12의 (b)에 도시하는 바와 같이, 전자 부품(608)의 상을 촬상면(807)에 결상시키는 것을 목적으로 하는 렌즈 중앙부(1201a)(결상계 시야 내의 영역)와, 촬상면(807)에 조명광을 유도하는 것을 목적으로 하는 렌즈 주변부(1201b)(결상계 시야 밖의 영역)에서 곡률 반경이 다른 측면 형상이며, 렌즈 주변부(1201b)는 본 물체측 렌즈(1201)에서 굴절된 동축 조명광(502b2)이, 그림 5의 (b)에 도시하는 입사각(2θ+α)으로 되는 곡률 반경으로 한다. 또한, 그림 12의 (b)와 같이 보조 렌즈를 물체측 렌즈와 일체화할 뿐만 아니라, 그림 12의 (c)와 같이, 렌즈 중앙부 1201a부와 렌즈 주변부 1201b부의 표면의 단차를 없애고, 1201a부와 1201b부 사이에서 곡률만 그림 12의 (b)에 도시한 구조와 마찬가지로 변화되도록 해도 좋다.
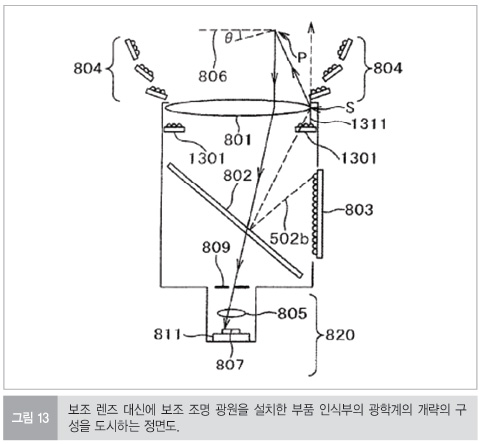
그림 13에는 보조 렌즈(808)를 설치하지 않고, 물체 렌즈(801)의 후방에서 물체 렌즈(801)와 카메라 렌즈(805)로 형성되는 결상계 시야 밖의 범위에 보조 조명(1301)을 설치하고, 보조 조명(1301)으로부터의 조명광을 부품 표면 P(표면 기울기각 θ)로 유도하는 구성을 도시한다. 또한 그림 13에는 보조 조명(1301)으로부터 사출된 광선의 광로(1311)를 도시한다. 물체측 렌즈(801)의 바로 후방에 보조 조명(1301)을 설치함으로써, 그림 13에 도시하는 동축 조명 유닛(803)으로부터 발사된 광의 광로(502b)(점선의 광로)에 비해, S점(물체측 렌즈(801)의 개구부의 단부의 부분)에서 물체측 렌즈(801)에 입사하는 동축 조명광(1311)(실선의 광로)의 입사각을 작게 할 수 있고, 물체측 렌즈(801)에 의한 굴절만으로, 그림 5의 (b)에 도시하는 조명광(502b2)의 입사각으로 전자 부품에 조사할 수 있게 된다. 그 결과, 그림 5의 (b)와 동일한 표면 기울기를 갖는 P점으로부터의 반사광을 촬상면에 도달시키는 것이 가능해진다. 또한, 그림 13에 도시한 광학계에 있어서, 보조 조명 이외의 광학계의 구성은, 그림 8에 도시한 구성과 동일하다.
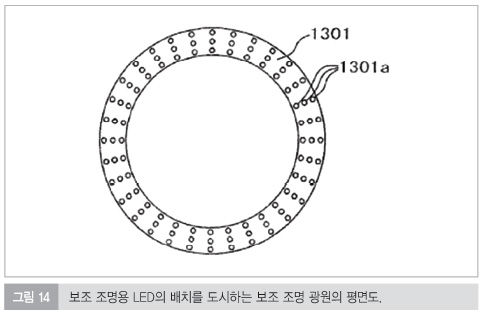
보조 조명(1301)은, 보조 렌즈(808)의 경우와 마찬가지로, 결상계 시야 밖의 범위에만 설치할 필요가 있으므로, 그림 14의 환 형상의 영역(1401)에 각 LED(1401a)를 동심원 형상으로 배치한다(도면에는 LED를 3열로 배열한 예를 나타내지만, LED의 수는 3열에 한정되는 것은 아님). 이와 같이, 결상계의 시야 밖에만 보조 조명을 배치함으로써, 보조 렌즈(808)와 마찬가지로, 카메라의 촬상 화상에 영향을 미치는 일 없이, 부품 표면 기울기각에의 대응력을 향상시키는 것이 가능해진다.







