V2V 통신 시스템이라고 불리는 이 시스템은 자동차 간 통신뿐만 아니라 신호등, 노변, 작업지역, 학교지역 등에 설치된 인프라와 교신하면서 주변상황을 인식할 수 있도록 연구개발 중에 있다. 새로운 테크놀로지가 융합된 이 시스템은 V2X의 개념으로 진화하여 가고 있다. 자동차가 종합기계라는 말은 이제 옛말이 되었다. 종합전자제품이라는 말도 이제는 잘 어울리지 않게 되었다. 이동식 종합정보 네트워크 시스템이 되어가고 있다. IT와의 기술융합이 자동차를 빠르게 변모시켜 가고 있다. 스마트폰, SNS, GPS 등과 같은 첨단 기술이 결합된 커넥티드 카(Connected Car), 또는 스마트 카(Smart Car)로 도약 중에 있다.
V2V와 ITS

V2V 통신 시스템은 도로나 교차점 등에 배치된 인프라 중계를 통하지 않고 차량끼리 직접 정보를 교환 할 수 있는 시스템이다. V2V 통신 시스템에 사용되는 무선 통신망으로는 와이파이(Wi-Fi), 근거리전용통신 등에 의해 할당된 전용채널을 활용한다. 기존의 레이더 기반 통신기술은 직선상에 위치한 물체만 인지할 수 있었지만 무선망 통신을 활용하면 직선뿐만 아니라 360도 전방위 탐색이 가능하다. 그림 1은 V2V 통신 시스템의 개념을 보여주고 있다.
V2V 기술은 시야 확보가 어려운 경우에도 운전자가 방향 및 거리에 대한 제약 없이 다양한 정보를 제공 받을 수 있다. 주행 중인 차량끼리 상호 주행정보를 주고받으며 위험성을 알려 연쇄 추돌 예방이 가능하다. 교통이 혼잡한 도로에서 갑자기 교통패턴이 변화하는 경우 V2V 통신으로 정보를 전달하여 운전자의 신속한 대응이 가능하다.
자동차와 IT기술의 융합은 차량 센서기술, 측위기술, V2V 통신기술, V2I 통신기술, 플랫폼 기술 등 다양한 기술과도 융합되어 상승적인 효과를 내고 있다. V2V와 V2I 통신기술은 차량안전서비스와 자율주행 서비스를 가능하게 할 수 있다. 미래 ITS를 활용한 스마트 하이웨이 서비스에도 필수적인 기술로 자리 잡을 것으로 전망 되고 있다.
차량에 부가 통신장치들을 적용한 ITS 인프라를 이용하여 교통 정보 획득과 주변 차량 사이에서의 정보 교환을 통해 불완전한 정보요소를 보충하는 차량안전통신(VSC: Vehicle Safety Communication)이 최근 주목을 받고 있다. 이는 고속 이동 중에도 차량에 긴박한 충돌이나 위험한 전방 상황을 예보하고 위험 요소를 경고하며 주변 차량들과 주변 도로에 대한 실시간 정보를 제공함으로써 운전자에게 미리 교통사고를 회피할 수 있도록 하여주는데 목적이 있다.
이를 구현하는 형태는 긴급 메시지 전달을 위한 V2V 통신과 도로변에 설치된 노변 기지국을 통해서 다량의 정보를 제공하는 V2I 통신으로 크게 두 가지로 나눌 수 있다. V2V 통신에서 수집된 정보는 V2I 통신을 이용하여 지능형교통시스템 ITS에 통합되어 그 활용도를 높일 수 있다.
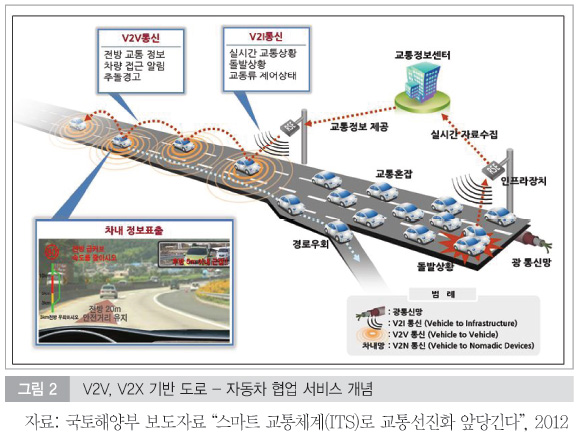
ITS가 V2V, V2I 통신과 융합되면서 신개념의 ITS로 변모하고 있다. 기존의 ITS는 영상, 전자기파 등의 기술을 이용하여 특정지점에서 차량 통과시 차량을 물체로 인식하여 차량의 주행 정보를 획득하였다. 신개념의 ITS는 차량이 주행하면서 도로 인프라 및 다른 차량과 지속적으로 상호 교신하며 교통상황 등 각종 유용한 정보를 교환, 공유하기도 한다. 그림 2는 V2X와 융합된 자동차의 협업 서비스 개념을 나타낸다.
V2V 통신장치의 보급률이 낮을 때에는 V2I 통신을 병용해서 해결하는 방법이 많이 사용되었다. 그러나 지금은 V2I 통신은 V2V 통신의 보조설비로 자리 잡아 가고 있다. 자율형 안전지원 시스템을 포함해서 차량 단독으로 기능하는 시스템에서는 전혀 문제가 되지 않지만 V2V 협조 및 V2I 협조를 전제로 한 협조형 시스템에서는 어느 한쪽이 없으면 의미가 없게 된다.
V2V에 의한 충돌 방지 시스템
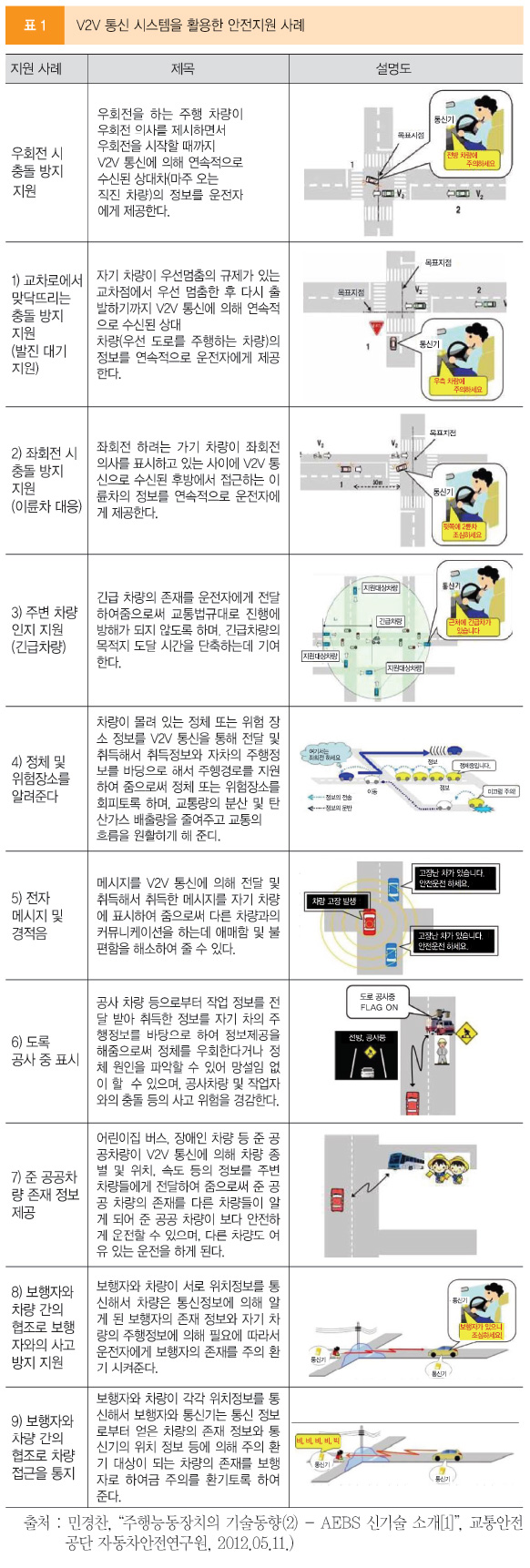
V2V 통신 시스템에 의한 충돌사고 방지 지원 사례를 표 1에 정리하여 나타내었다.
차량안전 통신(VSC: Vehicle Safety Communication)
VSC는 고속으로 이동하는 중에도 차량에 긴박한 충돌이나 위험한 전방 상황을 예보하고 위험 요소를 경고하며 주변 차량들과 주변 도로에 대한 실시간 정보를 제공함으로써 운전자에게 미리 교통사고를 회피할 수 있도록 하고 있다. 이를 구현하는 형태는 긴급 메시지 전달을 위한 V2V 통신과 도로변에 설치된 노변 기지국을 통해서 다량의 정보를 제공하는 V2I 통신이 ITS와 통합되어 유용하게 활용되고 있다.
통신방식은 V2V는 차량간 충돌, 도로상의 장애물, 교차로 충돌 등을 경고 하거나 협동주행, 차선변경 등에 적용되고, V2I는 보이지 않는 도로, 교차로 충돌, 건널목, 도로 공사구간 등을 경고하거나 전자 표지판, 고속도로 병합보조, 자율운전 등에 주로 응용된다.
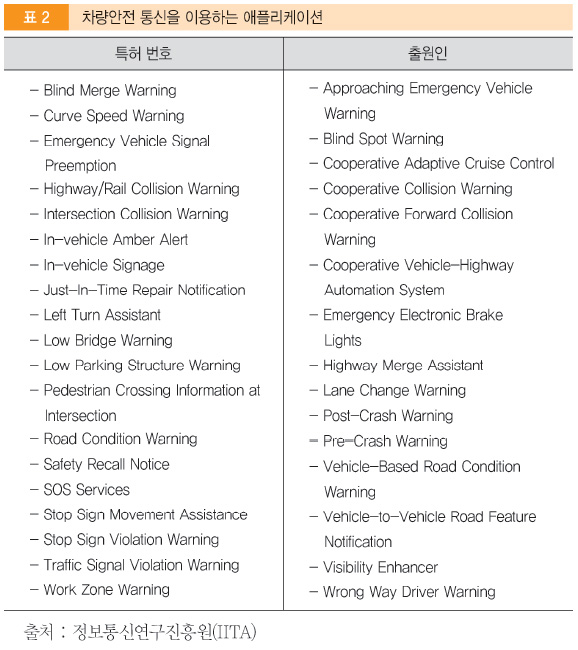
차량안전 통신 컨소시엄(VSCC: VSC Consortium)에서는 차량안전 통신을 이용하는 애플리케이션을 표 2와 같이 선정 발표하였다. 향후 전망 분석 자료에 의하면 ‘Traffic Signal Violation Warning’, ‘Curve Speed Warning’ 그리고 ‘Emergency Electronic Brake lights’를 2007년부터 2011년까지 북미를 중심으로 조만간 제공할 수 있고 남은 다섯 가지 주요 응용은 중장기적인 제공을 목적으로 2016년까지 갖출 것으로 예측하고 있다.
횡 방향 주행안전 시스템
운전자의 사각지역에 있는 차량과 충돌할 것이라고 예측되는 경우 운전자에게 경보를 제공하는 시스템들이 다수 개발되었다. 하지만 이러한 경보 시스템들의 단점은 운전자에게 경보만을 제공할 뿐 능동적으로 차량을 제어하지 않기 때문에 운전자가 경보에 제때 반응하지 못해 횡 방향 충돌이 일어나는 것까지는 방지하지 못한다는 것이다. 따라서 운전자의 부주의로 인한 횡 방향 충돌 방지 시스템이 활발하게 개발되고 있다.
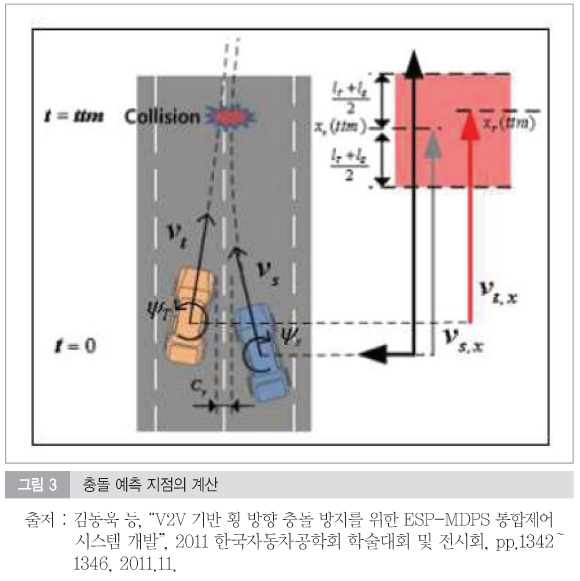
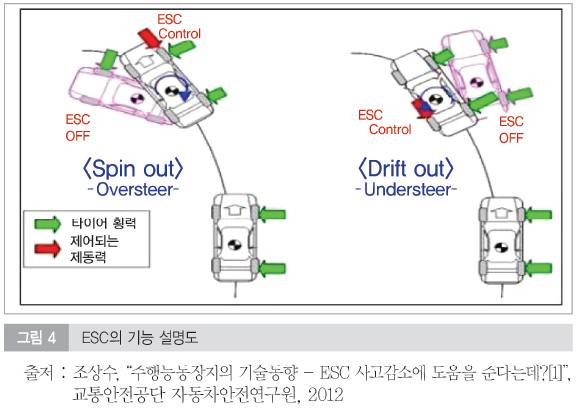
V2V로 얻은 대상 차량의 정보와 자 차량의 정보를 이용해 등가속도 식에 의해 충돌 예상 지점을 계산한다. 이를 근거로 전동 파워 스티어링(EPS)에 의해 조향 토크를 보조하고 차체자세제어장치(ESC: Electronic Stability Control)에 의해 부족한 요구 속도를 동시에 제어하여준다. 탑승자의 승차감을 유지하면서 횡 방향 충돌을 방지하도록 하는 주행안전 시스템이다.
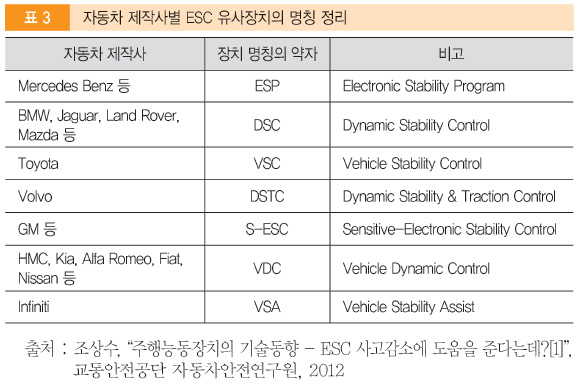
ESC는 자동차 업체마다 제각각 다른 이름으로 불러지고 있어 혼동을 일으키기도 하지만, 실제 주행 중 사용되는 알고리즘 및 상세 기능에서 약간 상이한 것을 제외하고는 거의 비슷한 기능을 하는 장치이다. 표 3은 각사마다 다르게 불리고 있는 ESC를 정리한 것이다.
ESC는 1995년 Bosch에서 최초로 개발하여 Benz에 장착되어 판매되기 시작하였다. 2008년 미국의 제안으로 UN자동차 관련 협의기구(WP.29)에서 세계기술규정(GTR: Global Technical Regulation)에 GTR No.8 ‘ESC System’이 제정되면서 공통용어가 되었다. 그림 4는 ESC의 기능을 설명하고 있다.
종 방향 주행안전 시스템
주행 중 추돌사고로 가장 많은 비중을 차지하는 것이 종 방향 충돌사고이다. 운전자 부주의 등 기타 요인에 의해 전방차량, 장애물, 보행자 등의 출현으로 인한 감속이 요구되는 상황에서 적절한 감속을 하지 못하는 경우가 많다. 이런 경우 추돌상황에서 제동을 통하여 추돌 속도를 감소시켜 피해를 경감시켜주거나 원천적으로 방지해주는 첨단 시스템들이 연구개발 되고 있다. 이미 실용화 되어 적용되고 있는 시스템으로는 충돌예방 안전 시스템(PCS: Pre-Crash Safety system), 전방 충돌 위험경보 시스템(FVCWS: Forward Vehicle Collision Warning System) 등이 있다.
최근에는 저속에서 사고를 완전히 회피할 수 있는 긴급 상황 자동제동 시스템(AEBS: Automatic Emergency Braking System)이 출시되고 있다. Volvo의 ‘City Safety’, Nissan의 전면 추돌방지 시스템(Forward Collision Avoidance Assist) 등이 이에 해당한다. 더욱이 V2V와 ITS가 연계하여 고속에서도 추돌 사고를 회피할 수 있는 첨단 안전 차량(ASV: Advanced Safety Vehicle)의 개발이 각 자동차회사에서 한창 개발 진행 중이며 수년 내에 실용화 될 전망이다.
첨단 운전자 지원 시스템(ADAS: Advanced Driver Assistance System)
ADAS는 차량 상태, 운전자 상태, 주변 환경을 인식하여 운전자의 부담을 경감시켜주고 편의를 증진시켜주기 위하여 정보를 제공하거나 능동적으로 제어에 참여하는 시스템이다. 종래의 운전자 지원 시스템은 각 기능이 독립적으로 작용하였다면, ADAS는 Radar, Camera ECU 등을 이용하여 차선인식(LDW), 차선유지(LKS), 전방차량인식(FCW), 적응형 차간거리제어(ACC) 등을 하나의 시스템으로 통합되어 성능을 한 단계 올려준 것이 대표적인 특징이다.
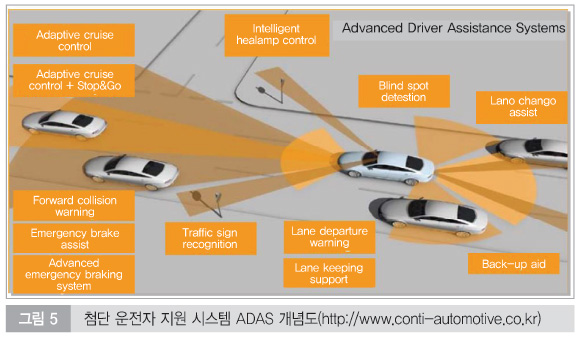
Radar ECU를 이용한 ACC기능은 전방 차량 인식 및 거리를 산출하여 스스로 차량의 속도 가감속을 제어하는 기능이 있으며 주행시 전방 충돌 가능성에 대해선 자동브레이크 제동 기능을 가지고 있다. Camera ECU는 LDW, FCW, IHC, TSR 기능 등이 있으며 나아가 차량 스스로 차선 내에서 운행되도록 하는 기능 LKAS를 구현하고 있다. 후방 Radar ECU는 차선 변경 지원, 후방 차량 감시 기능 등이 있다. 그림 5는 ADAS의 실용 예를 보여주고 있다.
저속 근거리 주행안전 시스템
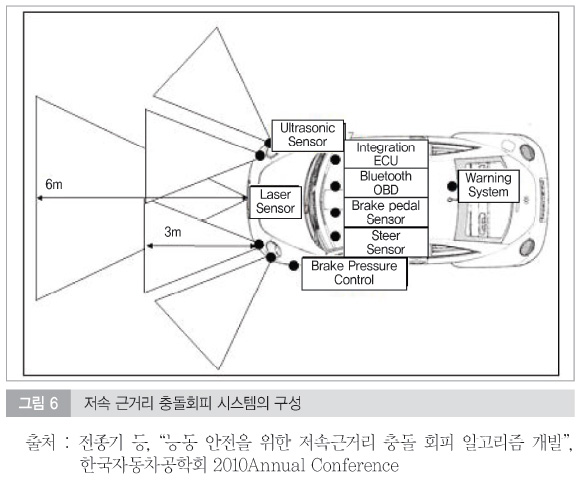
실제 교통사고의 대부분은 도심내의 30km/h 이하의 저속 근거리에서 70%이상이 발생한다. 이러한 상황에 비춰 최근 Volvo에서 선보인 City Safety 기능이 많은 주목을 받고 있다. 충돌회피 시스템의 구조는 그림 6과 같이 장애물을 감지하는 부분으로 6m 이내의 전방 장애물을 감지하는 레이저 센서와 3m 이내의 측면 장애물을 감지하는 초음파 센서로 구성되어 있다.
운전자의 제어의지를 감지하는 부분으로 브레이크 페달 센서와 조향 센서가 있고 차량속도, 조향 및 제동 등의 정보를 수집하는 자기진단(OBD: On Board Diagnostics)장비가 사용된다. 직접적인 충돌회피를 위해 브레이크 압력 제어와 경보 시스템(Warning system)이 있으며 모든 시스템을 통합 제어 하는 통합 ECU로 전체 시스템이 구성되어 있다.
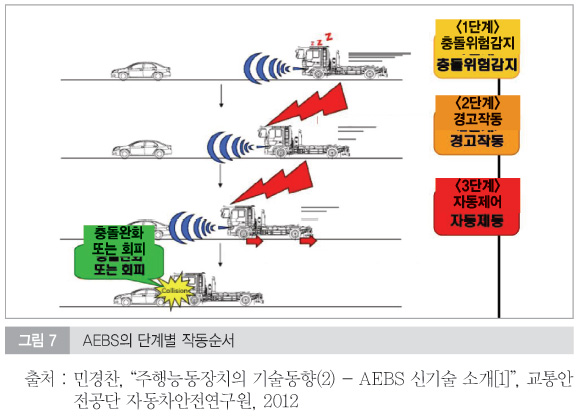
전방과 주행 차량의 속도와 가속도 변화율을 계산하여 충돌상태 판단을 안전(safety), 경고(warning), 위험(danger), 충돌(collision)의 4단계로 구분 각 상황에 적합한 조처를 하여 준다. 안전 단계는 충돌위험이 전혀 없는 상태이며, 경고 단계는 충돌위험이 감지되는 단계로 운전자에게 적절한 경고를 제공한다. 위험 단계는 충돌이 예상되어 주행차량의 속도를 일부 줄이는 제동 기능도 함께 수행한다. 마지막으로 충돌 단계는 충돌이 확실하여 이를 피하기 위하여 주행차량의 속도를 최대한 줄이는 제동 기능을 수행한다. 그림 7은 AEBS의 단계별 작동 순서를 보여주고 있다.
자율주행 시스템(Autonomous Driving System)
최근 IT업체인 Google이 자율주행 자동차 관련 기술과 현황을 언론에 발표하였다. ‘자율 주행모드로 전환할 수 있는 복합모드 차량(Transitioning a mixed-mode vehicle to autonomous)’이라는 이름으로 이미 특허를 획득하였다. 차량의 지붕에서 빙글빙글 돌아가는 라이더(LIDAR: Light Detection and Ranging) 또는 레이저 레이더(Laser radar) 또는 레이저 레인지 파인더(Laser range finder)라고 하는 장치가 있다. 현재는 Velodyne社의 64빔 레인저를 사용한다. 레이저를 쏘아 반사해서 돌아온 신호를 분석하여 주위의 3차원 지도를 만드는 장치이다. 앞과 뒤의 범퍼에 설치되어 있는 4개의 레이더는 고속주행에서 원거리를 관할할 수 있고 후미경(Rear view mirror) 가까이에 설치된 카메라는 신호등을 감지하고 GPS, 관성항법장치, 바퀴의 엔코더를 사용하여 자동차의 정확한 위치를 확인한다.
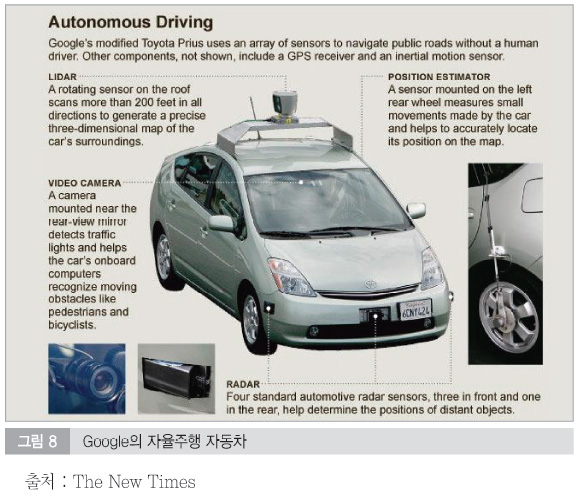
Google의 자율주행 자동차는 이미 확보하고 있는 정밀한 지도 정보와 자신이 움직이며 수집한 정보를 비교하여 고정된 설치물과 움직이는 물체를 파악하여 사고 없이 잘 달릴 수 있다. 외부와의 정보교환은 V2V, V2I를 활용하여 도로정보, 차량의 흐름과 고장, 교통신호 등 다양한 정보를 주고 받을 수 있다. 자동차와 IT기술의 대표적인 융합기술이 자율주행 자동차이며 이러한 시스템이 성공하기 위해서는 국제기구를 통한 표준화와 국가 간의 기술협력이 중요하다.
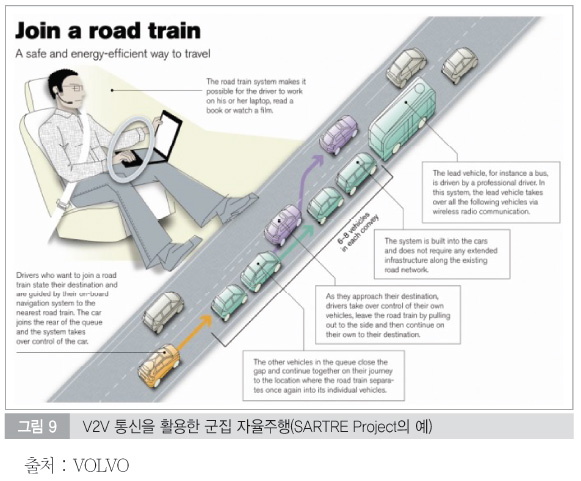
SARTRE Project는 ‘환경을 위한 안전한 도로주행 열차(Safe Road Trains for the Environment Project)’의 줄임말로 EU에서 기획한 프로젝트다. SARTRE는 궁극적으로 일렬 주행을 통해 개별 운송수단을 친환경적인 군집 자율주행(Join a Road Train)을 목표로 하고 있다. 맨 앞에 있는 선두 차량만 숙련된 운전자가 직접 운전을 하고 그 뒤의 다른 차량들은 V2V 통신 시스템을 활용하여 모든 주행 관련 행위를 자율주행 시스템에 맡기고 뒤따라가기만 하는 것이다.
군집 자율운행을 하는 모든 차량은 독립적인 기능을 갖고 있기 때문에 언제든지 단체 주행 모드를 해제하고 필요에 따라 직접 운전이 가능하다. 하지만 차내 인터페이스를 통해 인접한 단체 주행 차의 존재와 목적지를 확인한 뒤 단체 주행 모드로 합류하면 선도차의 관리와 통제에 따라 이동한다.
종래 이동 수단으로만 활용했던 자동차는 운전자가 이동하면서 원하는 것을 다양하게 할 수 있는 다중 과업화(Multitasking) 공간으로 활용 할 수 있게 되었다. 군집 자율주행은 일차적으로 일렬 주행으로 인해 차간 거리가 좁혀져 교통 체증을 개선시키고 사고 발생률을 감소시킨다. 뿐만 아니라, 공기 저항 감소로 인해 최대 20%의 연비개선과 배출가스의 절감도 가능하다. 즉 미래 환경에 적합한 친환경 기술로서 사회 후생 증대에 상당한 파급효과를 기대할 수 있다. 그림 9는 V2V 통신을 활용한 군집 자율주행의 예를 보여주고 있다.
국내외 기술동향
해외 기술 동향
가. 미국
운전자의 위험을 예지해 주어 사고 자체를 예방하는데 V2V는 많은 기여를 하고 있으며, 교통사고를 감소시키기 위해서 보행자나 상대 자동차를 포함한 새로운 상해를 줄이기 위한 기술로서 V2V 통신기술이 전세계적으로 각광을 받으며 개발에 매진하고 있다.
미국의 Ford社는 강화된 WiFi와 GPS 기술에 기반을 두고 연구를 진행 중에 있으며, V2V 통신 기술을 통해 자동차간 충돌을 줄이는 것뿐만 아니라 잠재적으로 연료소비 절감도 가능토록 하고 있다. 또한, 차세대 전기자동차를 위해 운전자가 가장 가까운 전기자동차 충전소를 찾을 수 있도록 돕는 모바일 애플리케이션도 개발 중에 있다.
차량통신을 이용하여 차량 안전 서비스를 제공하기 위하여 2003년 BMW, Daimler Chrysler, Ford, GM, Nissan, VolksWagen을 중심으로 VSCC(Vehicle Safety Car Community)가 구성되었다. VSCC는 도로에서의 차량충돌 감소를 위한 차량 안전 서비스 요구사항을 정의하고 WAVE 기술을 적용하여 성능을 평가하고 통신 프로토콜의 표준화를 추진하고 있다. 차량 안전 서비스에서 우선순위가 높은 서비스는 통신 인프라 기반의 급커브 경고, 좌회전 지원, 신호위반 경고이고 V2V 통신 기반의 전방 충돌 경고, 긴급 전자 브레이크 라이트, 차선변경 경고, 사전 충돌 감지가 있다.
미국 운수부(DOT)의 고속도로교통안전국(NHTSA: National Highway Traffic Safety Administration)은 2014년 2월 3일 (미국 현지시간), 승용차에 차차간통신기술을 장착하기 위한 준비를 본격적으로 시작한다는 방침을 표명하였다. 차량 속도나 주행 위치와 같은 주행시의 안전에 관련된 데이터를 차차간통신으로 1초간 10회 주고받는 것으로 추돌사고를 회피할 수 있도록 되어있다. V2V 통신기술을 사용하면, 전방에서 주행하는 차량의 급감속 등 사고발생으로 이어질 수 있는 정보가 송신되었을 때 사고 발생의 가능성이 있다는 것을 드라이버에게 알릴 수 있게 된다. 또한 사고 발생의 가능성이 있다는 정보를 더 뒤에 있는 차량에게도 송신하여 연속 추돌 사고가 발생하지 않도록 하는 것도 가능하다.
DOT은 2012년 8월부터 Michigan Ann Arbor 시에서 V2V 통신 기술의 실증실험으로 ‘Safety Pilot Model Deployment’를 실시하고 있다. V2V 통신 모듈을 약 3,000대 차량에 장착한 대규모라는 점 이외에도 각기 다른 메이커의 차량과 V2V 통신 모듈의 사이에서 통신을 시행한다는 점에서도 V2V 통신 기술의 실용성을 확인할 수 있어 주목받고 있었다. 실험 참가자의 평가는 대부분 양호하였으며, 장래적으로 실용화 된다면 자신의 차량에 장착하고 싶다는 의사를 내비치고 있었다.
NHTSA는 GM, Honda, HMC. KIA, Benz, Nissan, Toyota, VW 등 8개의 자동차 제조업체와 지난 수년 동안 이 기술에 대한 연구 작업을 공동으로 진행하여 왔다. Ann Arbor 시험은 운전자가 경고에 어떻게 반응하는지에 V2V 통신기술의 성공여부가 달려있기 때문에 이를 확인하고 기술을 보완하려는 목적으로 운영되는 것이다.
Ford는 패밀리 세단인 2013년 모델 Fusion에 고급 세단에서나 볼 수 있음직한 최첨단의 반자동 안전 시스템 ADAS를 장착해 출시했다. V2V 통신망과 Google 등과 같은 위치 계측 기반 기술과 결합하여 첨단의 정보 및 인지력을 발휘하게 될 전망이다. 레이더, 초음파, 광학 및 모션 센서 패키지는 전동 파워 스티어링(EPS), ABS, 차체 자세제어 시스템(ESC: Electronic Stability Control)과 연계되어 새로운 차원의 안전과 편의가 제공되는 준 자율형 자동차이다.
미국 교통부(DOT)는 안정성 향상을 위한 새로운 V2V 통신 기술에 대한 운전자 반응 유형 시험인 ‘Driver Acceptance Clinic’을 여섯 개 도시에서 실시할 계획이다. 다양한 지리적 환경에서 DSRC 기반 안전 도구를 장착한 24대 차량과 100명의 지역 운전자를 대상으로 실시되며, 시험이 완료되면 실제 운전 환경에서 수 천대의 차량을 이용해 V2V 기술의 효과를 확인할 예정이다. 시험결과는 미국 고속도로교통안전관리국(NHTSA)이 신차에 V2V와 V2I 시스템 적용 여부를 판단하는데 활용할 것이다.
Stanford 대학의 교수이자 Google의 부사장인 Sebastian Thrun이 이끄는 Google 카 프로젝트는 20여 명의 세계 최고 전문가들이 모여 6년 가까운 연구개발을 거쳤고 20만 마일(약32만km)의 시험주행을 마쳤다. 특히 레이저 센서는 차가 움직이면서도 실시간 지도와 교통상황을 미리 감지한다. 실용화 되면 출퇴근 시간에도 운전 대신 웹 서핑 등 보다 창조적 일을 할 수 있을 것이라고 본다. 과속 및 주정차 횟수도 줄일 수 있어 연비 효과도 클 것으로 전망하고 있다.
나. 유럽
EU에서 추진되는 차량 안전기술 프레임워크 프로젝트 가운데 SAFESPOT 프로젝트는 2006년부터 4년간 37Million 유로를 투입 ‘Smart Vehicles for Smart Roads’라는 비전을 목표로 수립하고 차량이 주행하면서 주위 차량을 실시간으로 모니터링 하는 Cooperative 통신기술과 차량 안전 서비스 기술을 연구하고 있다.
SAVECOM 프로젝트는 V2V, V2I 통신의 아키텍처 및 보안 메커니즘을 규정하는 프로젝트로 2006년 2월부터 3년간 528만 유로가 투입되었으며 보안성 및 프라이버시 등을 고려하여 통신 프로토콜의 규정을 연구하고 있다. C2C 컨소시엄, FP6 프로젝트(CVIS, SAFESPOT, COOPERS, COMeSAFETY)와 협조체제를 구축하고 있다.
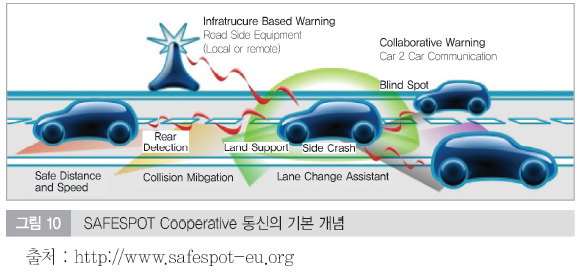
SAFESPOT 프로젝트는 그림 10과 같이 이동하는 차량이 센서를 기반으로 실시간 차량 주변상황을 인식하여 V2V 통신으로 안전 서비스를 공유하고 노변에 설치된 기지국으로부터 안전에 관련된 메시지를 제공받아서(V2I) 차량의 안전 운행을 지원하는 안전기술이다. Cooperative 통신은 ‘Dynamic Ad-hoc Networking’, ‘Accurate Relative Localization’, ‘Dynamic Local Maps’이 주요 기술이며 이중 Localization 기술은 GPS, DGPS와 landmark 등을 복합적으로 이용하는 방식의 기술이다.
독일 연방교육연구부가 주관인 C2C 통신 컨소시엄(C2C-CC: Car to Car Communication Consortium)은 Audi, BMW, Daimler Chrysler, Fiat, Renault, VW 등이 참여하여 미국에서 추진하고 있는 WAVE 기술을 적용하여 차량 안전과 교통에 활용을 추진하고 있다. 자동차가 송수신기가 돼 사고가 나거나 차가 밀려 특정 구간을 통과하지 못할 경우 자동차끼리 Ad-Hoc 네트워크를 통해 정보를 공유하게 된다. 그 밖에 차량 통신 네트워크 기술로 INTERSTATE 프로젝트는 교차로에서의 안전기술을 연구할 목적으로 2006년부터 Volkwagen, Renault, Inria 등이 컨소시엄 형태로 추진하고 있다.
CVIS 프로젝트는 차량과 노변간 통신 시스템으로 12개국 63개 업체가 참여하는 대규모 프로젝트이다.
다양한 텔레매틱스 서비스에 적용을 고려하여 통합망 관리, 종착점 기반 제어, 망기반 가속/감속, 동적버스차로 운영, 운전자 인식, 망기반 운전자 지원 서비스, 화물 및 차량관리, 위치관리, 위험물 관리, 주차 예약 등을 개발하고 있다. 또한 IEE 802.11 표준과 연계하여 OSGi 기반 단말 플랫폼도 추진하고 있다.
C2C-CC 컨소시엄은 미국에서 추진하고 있는 WAVE 기술을 적용하여 차량 안전과 교통에 활용을 추진하고 있으며, Audi, BMW, Volks wagen, Renault, Fiat가 참여하고 있다. Sweden의 Volvo는 Spain의 고속도로에서 군집 자율주행 자동차 시운전에 성공하였다. 시운전은 전문 운전자가 운전하는 선도 차량의 뒤를 자율주행 자동차 4대가 나란히 뒤따르면서 진행되었다. 이들 자율주행 차량들은 가속과 제동은 물론 조향과 6m 간격 유지 등을 스스로 해내며 200km의 구간을 최고 시속 85km로 달렸다. 이는 유럽 위원회(EC)에서 진행하는 SARTRE Project의 일환이다.
다. 일본
일본은 DSRC 통신을 이용한 ETC 서비스가 전국적으로 확산되어 있으므로 DSRC 통신 인프라를 기반으로 교통정보와 차량 안전 서비스를 지원하는 연구에 중점을 두고 있다. 셀룰러, 무선랜과 연동되어 차량에서 인터넷 서비스를 제공하는 인터넷 ITS 기술이 발달하였다.
Denso는 2008년부터 눈보라나 안개, 고저 차이가 있는 지형에서도 맞은편 차량을 감지할 수 있는 사고 방지 시스템의 실험을 시작했다. 직선으로 전파를 발신하는 레이더와 달리 휴대전화와 같이 차량끼리 통신해 전후좌우 어느 위치에 차량이 있어도 확인할 수 있는 ‘V2V 통신’을 시도하고 있다. 해외에서 이용할 수 있는 통신 대역에서의 실험도 진행해 실용화되는 2010년 이후 해외 전개도 염두에 두고 있다.
Toyota 자동차는 차량 간 통신에 이어 도로에 설치된 기기와 차량이 교신을 해 다중적으로 안전을 확보할 수 있는 기술을 개발하고 있다. 좌회전시(일본의 경우 우회전시) 맞은편 차량과의 충돌을 막는 시스템은 라디오 커뮤니케이션 기능이 있는 카메라를 이용해 맞은편 차량을 촬영해 그 정보를 자동차가 수신함으로써 맞은편 차량과의 교신을 통한 사고를 막는다.
Mazda는 차세대 고속 라디오 커뮤니케이션 ‘모바일 WiMAX’를 이용한 안전 운전 지원 시스템을 개발하고 있다. 이 시스템은 서버에 축적된 운전자의 운전 정보를 활용해 이용자 상황에 맞게 상세한 운전을 지원한다.
Nissan자동차는 일본 국토교통성 ‘선진 안전 자동차(ASV : Advanced safety Vehicle) 추진 계획’에 근거해 차량 간 상호통신(차량-차량 간 통신))을 이용해 교통사고 저감을 목표로 하는 선진 안전 자동차 ‘닛산 ASV-4’를 개발했다. ‘닛산 ASV-4’는 차량 간 통신을 이용한 주의 환기 시스템으로 추돌사고 등 상대를 보기 어려운 상황에서도 운전자가 재빨리 위험을 피할 수 있도록 해 안전성 향상을 보다 더 도모할 수 있는 것을 특징으로 한다. 또한 ‘닛산 ASV-4’에서는 평가 실험을 통해서 실제 내비게이션 지도 활용이나 통신기를 탑재하지 않는 차량을 포함한 환경 하에서 시스템에 대해 과신하지 않도록 하는 주의 환기 방법 등 실용화를 목표로 하고 있다.
Mitsubishi자동차는 국토교통성 주도의 제3기 ASV 프로젝트(ASV-3)와 관련해 실용화를 목표로 개발하고 있는 예방·충돌안전 기술을 탑재한 선진 안전 실험차량 ‘미쓰비시 ASV-3’을 완성시켰다. NEC의 차량 간 통신 시스템은 NEC 유럽 연구소가 개발한 차량 간 통신 프로토콜을 제어하는 소프트웨어를 핵심으로 차량 탑재용 장치로서 실현된 것이다. 차량 간 통신 프로토콜을 제어하는 소프트웨어에는 현재 차량의 위치 정보를 다른 차량에 통지할 뿐만 아니라, 그 위치 정보를 바탕으로 정보의 전송 경로를 리얼타임으로 변경하는 PBRV(Position Based Routing for Vehicular ad-hoc networks) 기능이 실제 장착되어 있어 여러 대의 차량을 중계하는 멀티 호프 통신도 가능하다.
국내 기술 동향
전자부품연구원은 2006년부터 국제규격화가 진행되고 있는 IEEE802.11p 규격을 만족하는 WAVE(Wireless Access in Vehicular Environment) SoC (system on a Chip) 개발을 진행하여 2009년에 개발을 완료하였으며, 이를 기반으로 국내기업을 통한 상용기술 보급을 통해 차량용 단말 및 기지국장치의 생산이 가능할 것으로 전망된다.
한국전자통신연구원(ETRI)은 2007년 3월부터 지식경제부 국책과제의 일환으로 ICU, 현대자동차 등 산학연 전문가들과 공동 연구를 통해 IEEE802.11p 규격과는 다른 방식인 V2V 멀티홉 통신기술(Vehicle Multi-hop Communication)이라는 V2V 통신기술을 개발하여 상용화에 박차를 가하고 있다.
2011년 ETRI에서는 지식경제부의 IT융합 원천기술개발사업으로 지난 4년간 총 136억 원을 지원받아 스마트 하이웨이 시스템의 핵심기술인 ‘V2V 멀티-홉 통신기술(VMC; Vehicle Multi-hop Communication)’을 개발하였다. 이 기술은 고정되어 있거나 이동하는 접속점을 도약해 무선통신 네트워크를 효율적으로 구성하는 기술로 네트워크를 확장하지 않아도 가청범위를 넓힐 수 있다.
VMC 기술은 자동차간 실시간 무선통신을 통해 앞 차의 사고 등 돌발 상황을 뒤따라오는 차에 직접 전달하여 연쇄 추돌을 미연에 방지할 수 있다. 내비게이션과 연동되어 교통정체 없는 빠른 길 안내, 차량 고장 원격 점검 등에 활용할 수 있는 신개념 텔레매틱스로 각광받고 있는 추세이다. VMC의 주된 핵심기술은 고속 이동환경에서의 직교주파수분할다중(OFDM: Orthogonal Frequency Division Multiplexing) 모뎀 기술과 낮은 대기시간(low latency)과 많은 사용자 환경을 지원하는 CSMA/TDMA Hybrid MAC 기술, V2V 멀티 홉을 지원하는 멀티 홉 라우팅 기술, 차량 단말 플랫폼 기술, 차량 안전 서비스와 컨버전스(convergence) 서비스 기술 등을 포함하고 있다.
결 론
자동차가 종합기계라는 말은 이제 사라진지 오래되었다. 전자종합제품이라는 말보다도 이동식 종합정보 네트워크 시스템이 되어 가고 있다. IT와의 기술융합이 자동차를 빠르게 변모시켜 가고 있다. 스마트폰, SNS, GPS 등과 같은 첨단 기술이 결합된 커넥티드 카(Connected Car), 또는 스마트 카(Smart Car)로 도약 중에 있다.
V2V 통신기술은 자동차의 불필요한 에너지 소비를 저감시켜 연료효율을 증진시키고 잠재적으로 환경 문제도 완화시킬 것으로 전망하고 있다. V2V 통신기술을 장기적으로 추진하다 보면 결과적으로는 무인 자동차를 탄생시키게 될 것이다.
최근에는 센서 기술과 V2V 그리고 V2I 통신 기술의 발전으로 인지 영역이 확장됨에 따라서 고속도로 자율 주행(Highway Autonomous Vehicle), 커넥티드 스마트 자동차(Connected Smart Vehicle), 충돌 안전 자동차(Crash-Free Vehicle) 등의 개발이 가속화되고 있으며, 나아가서는 준 자율 주행 차량(Semi-Autonomous Vehicle), 그리고 완전 자율 주행 차량(Autonomous Vehicle)의 출현도 눈앞에 두고 있다.
