커넥티드 카 관련 전문 시장조사 기관인 SBD가 분석한 바에 따르면 커넥티드 카 서비스영역은 안전(Safety), 보안(Security), 편의(Convenience), 내비게이션(Navigation), 인포테인먼트(Infortainment), 전기자동차 서비스(EV Services), 차량관계 관리(Vehicle Relationship Management), PAYD 보험(Pay As You Drive Insurance), 기업차량 관리(Fleet Management), 전자 통행료 징수(Electronic Tolling) 등이 포함되어 있어 이와 관련한 다양한 서비스들이 향후 제공될 것으로 예상된다.
VANET 기술
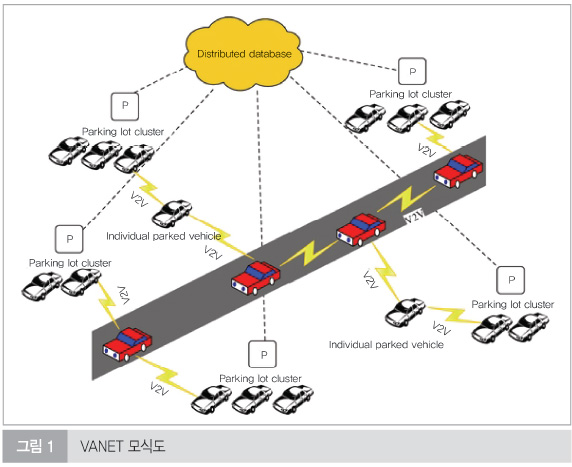
차량 에드혹 네트워크(VANET: 컴퓨터에서 사용되는 무선 네트워크의 한 분야로 최근에 각광을 받고 있다)는 네트워킹 분야에서 새로운 영역이며 모바일 에드혹 네트워크의 일부분이다. 차량 에드혹 네트워크는 V2V(Vehicles to Vehicles), R2R(Rodeside Unit to Rode-side Unit)와 V2R(Vehicles to rode-site Unit) 통신을 제공한다.
차세대 무선통신 기술 WAVE(Wireless Access in a Vehicular Environment)는 현대식 차량에서 통신기술을 실행하기 위해 개발되었다. 또한 5.9GHz에서 작동하는 단거리 전용통신(DSRC : Dedicated Short Range Communications)으로 알려진 WAVE 표준은 최근에 만들어지는 지능형 교통시스템 (ITS)을 위한 미국연방 고속도로 당국의 운반체 인프라 집적화(VII: 차량과 도로인프라의 정보교환을 통해 교통이용에 있어 수준 높은 정보를 제공함으로써 교통운영자에게는 교통네트워크의 안전 및 효율적 관리에 도움을 주며 도로 이용자에게는 경로선택, 교통시설의 이용 결정에 도움을 주기 위해 미국에서 추진되고 있는 프로젝트)의 일부이다.
WAVE 표준 하에서 현대식 차량은 차량 간 무선통신(V2V)으로 각각의 차량 간에 통신을 할 수 있어야 한다. 그것들은 또한 차량의 인프라로 알려진 노변기지국(RSU)과 통신(V2I)하여 야 한다. WAVE 표준은 두 다른 표준 즉 IEEE 802.11p와 IEEE 1609의 조합이다. WAVE 표준에 의해 규정되는 것으로서 적용 가능한 MAC 메커니즘을 검토하는 동안 연구는 처리량의 관점에서 ADSA(Automatic Doppler Shift Adaptation) 방법의 힘에 대한 검증에 초점을 맞추었다. ADSA 방법이 VANET 통신에서 발생하는 DE문제에 만족할 수 있는 상당한 이점을 가지고 있다는 것이 증명되었다.
커넥티드 카 관련 전문 시장조사 기관인 SBD가 분석한 바에 따르면 커넥티드 카 서비스영역은 안전(Safety), 보안(Security), 편의(Convenience), 내비게이션(Navigation), 인포테인먼트(Infortainment), 전기자동차 서비스(EV Services), 차량관계 관리(Vehicle Relationship Management), PAYD 보험(Pay As You Drive Insurance), 기업차량 관리(Fleet Management), 전자 통행료 징수(Electronic Tolling) 등이 포함되어 있어 이와 관련한 다양한 서비스들이 향후 제공될 것으로 예상된다.
단거리 전용통신(DSRC)의 도움으로 VANET은 자주 방향을 바꾸는 많은 차량 간의 통신을 수행한다. 차량이 다양한 다른 차량들과 직접적으로 통신하고 도로에 고정 장비인 노변 사이트유닛(RSU)으로 교통 혼잡에 관한 정보나 경고 메시지를 보낸다.
인증 중앙기관(CA)은 특별한 사람/차량에게 인증을 제공하는 다른 모든 노드/차량에 증명서를 제공한다. RSU의 존재는 통신을 위한 사회기반 시설 모델에서 필요하다. 대부분의 방법은 노드의 신뢰성 값을 계산하는데 사용된 직접과 간접 트러스트로 기술된다. 여러 접근법은 클러스터 헤드(CH)가 작은 클러스터에 적절하게 접근하고 클러스터 내에서 트러스트 행정 인증기관이 제공한 에드혹 네트워크의 클러스터의 위에 보안통신을 위한 암호작성 기법을 사용했다.
VANET의 구조는 애드혹과 혼성구조인 셀 방식/WLAN의 3가지 범주로 나눌 수 있다. 인프라가 셀룰러 게이트웨이 또는 WLAN, WIMAX 액세스 포인트로 구성되면 네트워크는 완전 무선/WLAN을 고려할 것이다. 1999년에 미국연방통신기관(FCC)는 차량통신(VC)을 위해 5.850-5.925GHz에서 스펙트럼의 블록을 배정했다. 일본에서는 700개 MHz대역이 사용되고 비슷한 밴드가 유럽에서 사용되었다. 똑같은 목적을 위해 75MHz의 대역폭이 DSRC(근거리 무선통신)로 언급되는 이런 종류의 통신을 위해 FCC에 의해 배정되었다.
사고기록장치(EDR)는 전송을 기록하고 여행 동안 차량환경에서 발생한 메시지와 모든 사고를 전송받는다. 위성항법장치(GPS) 수신기는 지정된 시간간격으로 지리적 위치, 속도, 운동의 방향 그리고 노드 가속도를 전달한다.
스마트차량의 개발은 VANET의 여러 가지 새로운 문제의 애플리케이션을 생기게 한다. 이러한 애플리케이션은 두 개의 주요 그룹인 지적 트랜스포트 응용(ITA)와 편안함 응용(CA)으로 분류될 수 있다. ITA는 운송안전 응용(TSA)과 운송효율 응용(TEA)의 두 하위그룹으로 분할할 수 있다.
IEEE 802.11은 몇 개의 법규문서로 만들어진 IEEE의 무선랜(WLAN) 표준이다. 이러한 표준은 2.4, 3.6과 5GHz의 주파수대역에서 작동한다. WiFi는 이러한 WLAN 표준에 대한 정보처리 상호운용에 대한 책임을 맡은 연합이다. IEEE 802.11의 MAC(Medium Access Control) 작동은 다양한 조정기능을 가지고 있다. 이러한 기능은 채널에 접근하는 메커니즘을 제공한다.
CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)는 조정함수의 2가지 타입으로 분산조정함수(DCF)와 폴링기반 포인트 조정함수(PCF)를 처리하는 IEEE 802.11을 위한 경합방식 프로토콜인 MAC 프로토콜이다. IEEE 802.11p는 VANET에 대한 IEEE 권고표준이다. IEEE 802.11p는 5.85GHz에서 5.925GHz까지의 전용 주파수대역을 사용한다. IEEE 802.11p는 IEEE 802.11a의 물리계층(OSI 기본 참조모델의 7계층 중 제1계층에 위치하는 계층) 특성을 이용하고 변조방식으로 OFDM을 사용한다. IEEE 802.11p는 전송을 위해 각각 7개의 10MHz 채널을 사용한다.
IEEE 802.11n이 비교적 도시환경에서 민감한 지연과 대역폭 중심 애플리케이션에서 좋은 성적을 낸다고 논문은 결론짓는다. 오늘날 멀티미디어 애플리케이션은 요구가 많은 애플리케이션이므로 사용자는 VANET에서 이러한 애플리케이션에 관심이 있다.
IEEE 802.11은 흔히 무선랜, 와이파이(Wi-Fi)라고 부르는 무선 근거리통신망(Local Area Network)을 위한 컴퓨터 무선 네트워크에 사용되는 기술로 IEEE의 LAN/MAN 표준위원회(IEEE 802)의 11번째 워킹그룹에서 개발된 표준기술을 의미하며 IEEE 802.11p는 차량 이동환경에서의 무선액세스(wireless access in vehicular environments, WAVE)를 추가한 IEEE 802.11 표준의 승인된 수정판이다.
매체접근 제어(Media Access Control, MAC)는 자료전송 프로토콜의 하부계층이며 일곱 계층의 OSI모델에 규정된 데이터 링크 계층의 일부이다. 유선 멀티드롭 네트워크를 위한 패킷모드 다중접근 프로토콜의 예는 CSMA/CD(이더넷, IEEE 802.3에서 사용), 토큰버스(IEEE 802.4), 토큰링(IEEE 802.5), 토큰패싱(FDDI에서 사용) 등이 있고 패킷 라디오 무선 네트워크에 쓰이는 다중접속 프로토콜의 예는 CSMA/CA (IEEE 802.11/WiFi WLAN에서 사용), 슬롯형 ALOHA, 다이나믹 TDMA, R-ALOHA, CDMA, OFDMA 등이 있다.
VANET(Vehicular ad hoc Network)의 보안
운전하는 행동, 차량의 지난 위치와 현재 위치, 운전자의 아이덴티티와 같은 정보가 개인적일 것이다. 이것들은 프라이버시에 민감한 데이터(차량위치, 실제 아이덴티티, 속도, 시간)와 내부 자동차 센서 정보이다. 목적은 권한이 없는 관찰자가 드라이버의 정보에 닿지 못하게 하는 것이다. 그러므로 운전자의 위치와 움직임은 추적할 수 없어야 한다.
차량 애드혹 네트워크(VANET)는 가장 중요한 무선 모바일기술이 되고 있으며 지능형 교통시스템(ITS)을 실행하기 위한 유망한 접근 중 하나이다. VANET의 목적은 차량 사이의 통신을 허용하는 것이다. 그러므로 이러한 노드는 통신을 위한 무선 인터페이스를 포함할 필요가 있고 특정한 레인지 스펙트럼이 VANET 데이터교환을 위해 제공되어야만 한다.
VANET는 가까운 차량과 노변장치 사이에 통신을 제공하는 모바일 애드혹 네트워크(MANET: Mobile ad hoc Network)의 특정 유형이다. 노드에는 탑재장치(OBUs: On-board unite)와 노변기지국(RSUs: Road side units) 등 2가지가 있다. OBUs가 이동하는 차량에 설치된 무선기인 반면에 RSUs는 도로를 따라 설치되고 네트워크 기반 설비를 구성한다. RSUs는 차량 사이의 라우터로 작동한다.
프로토콜은 (1) 시스템 초기화, (2) OBU(탑재장치) 단시간 익명키 생성, (3) OBU 안전메시지 생성과 전송, (4) OBU 고속 탐색 알고리즘 등 4개 부분으로 구성된다. 키는 반드시 인증기관에 의해 인증되어야 한다. 타협활동이 관찰되면 키를 철회하는 것은 가능할 것이다. 사용자의 프라이버시를 보장하기 위해 익명 공개키의 사용은 저자에 의해 제안된다. 알고리즘은 이벤트의 (1) 단일호프, (2) 멀티홉 그리고, (3) 악의적 의도 등 3가지 타입을 포함하는 사건지향 접근을 따른다. 교통혼잡과 도로사고에 사용된 알고리즘은 (1) 주변탐색, (2) 데이터 전송, (3) 의사결정 그리고 (4) 트러스트 업데이트와 인접한 모니터링 등의 4개 단계로 나누어진다. 전체적 보안 아키텍처에서 5레벨 시스템이 제시된다. 모든 보안 측면에 대하여 자료, 인증, 트러스트, 메시지와, 암호용 레벨 인증에서 메시지 데이터 레벨과 암호용 레벨은 암호용 기능을 포함한다.
무선센서 네트워크에서 네트워크 수준 프라이버시는 (1) 아이덴티티, (2)라우트, (3) 위치, (4) 데이터 사생활보호 등 4가지 타입으로 나누어 규정한다. WSN의 기존 제한 때문에 네트워크 수준 프라이버시 달성은 도전적인 업무이다.
QoS(Quality of service: 통신서비스 품질. 네트워크상에서 일정 정도 이하의 지연시간이나 데이터 손실률 등의 보장을 일컫는 말로 사전에 합의 또는 정의된 통신서비스 수준을 뜻함) 라우팅 프로토콜과 무선센서 네트워크 알고리즘에서 프라이버시는 에너지 제한과 공격의 존재에서 신뢰성에 맞지 않는 패턴 경로를 사용한다.
V2X 네트워킹 기술
가. 네트워킹 기술
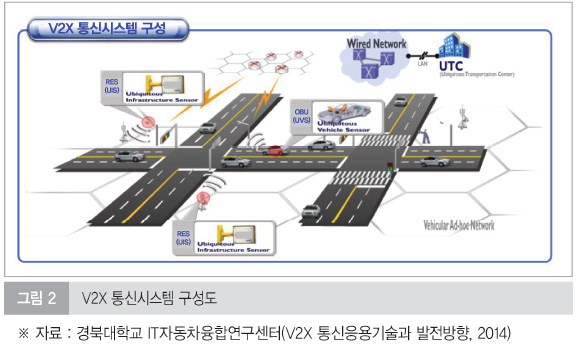
V2X(Vehicle to Infra/Vehicle/Nomadic)는 도로차량에 적용 가능한 모든 형태의 통신방식을 지칭하는 일반용어로서 ‘Connected Vehicle’ 또는 ‘Networked Vehicle’을 구현하기 위한 구체적인 통신기술을 의미한다.
V2X 네트워킹은 크게 세 가지 범주 즉, 차량과 차량 간 통신(Vehicle-to-Vehicle: V2V), 차량과 인프라 간 통신(Vehicle-to-Infrastructure: V2I) 그리고 차량과 모바일기기 간(Vehicle-to-Nomadic devices: V2N) 통신으로 나누어지는데 최근에 대두되고 있는 전기자동차의 충전과 관련해 또 다른 형태의 통신범주로 V2G(Vehicle-to-Grid)가 있다. V2G란 전기자동차는 일반 자동차의 엔진 대신 배터리에 있는 전력으로 모터를 구동하게 된다. V2G는 그 배터리에 있는 전력을 평상시에는 차를 주행하는데 사용하고 전력사용이 많은 피크 발생 시에는 충전된 전력을 전력망을 통해 반대로 송전하여 에너지를 효율적으로 사용하는 것을 말한다.
V2V란 ‘차량 간 무선통신(Vehicle to Vehicle)’의 약자로 자동차끼리 정보를 주고받는 기술이다. V2V는 근처 차량의 위치파악, 속도정보를 공유하며 갑작스러운 교통사고를 예방하는 시스템으로 각광받고 있다. 국내에서는 2011년 5월, 전자통신연구원(ETRI)이 선보인 ‘멀티홉 방식의 차량 간 통신기술(VMC)’이 그 시초이며 지능형 교통시스템(ITS)의 발달과 함께 그 영역을 넓히고 있다.
현재 미국에서는 자동차 V2V기술 도입을 법제화하며 안전기술의 중요성을 인식하고 적용하고 있다. V2V가 이처럼 각광받는 이유는 V2V기술 적용에 따른 기대효과 때문으로 우선 Wi-Fi 무선통신을 기반으로 한 위치공유가 가능해지며 일정범위 내에 있는 자동차들이 교통상황 정보를 주고받을 수 있게 된다. 또한 일반 주행상황에서 사고로 연결되는 모든 과정으로부터 탑승자를 안전하게 보호하며 교통사고의 80%를 예방할 수 있게 되며 충돌상황을 예로 들자면 일반 주행상황-위험상황-사고방지 및 경감’과 같이 충돌 전 모든 상황에 V2V가 관여하며 피해를 최소화할 수 있는 환경을 만들어 주는 것이다.
많은 장점 때문에 국내에서도 V2V 도입에 적극적으로 나서고 있다. 국토부는 2014년 7월부터 하루 평균 20여만 대의 차량이 통행하는 경부고속도로 서울~수원 구간에서 차량용 고속 무선통신 기지국, 도로 레이더, 지능형 CCTV 등을 설치, 구간을 지나는 차량에 단말기 100대를 설치하여 현장 실증시험을 하고 있다. 시연행사 참가자들은 실제 차량에 탑승해 서울~수원 간 약 20km 구간을 시속 90~100km로 고속 주행하면서 앞서 주행하는 차량과 제동상태, 급정거, 차간거리 등의 정보를 서로 주고 받아 위험상황에 대한 경보를 확인하고 이에 대응하는 상황을 체험하였다. 이 기술은 차량에 설치된 단말기를 통해 고속 주행하는 차량끼리 0.1초마다 운행상황 정보를 주고받을 수 있기 때문에 운전자 부주의 등으로 발생하는 교통사고를 근본적으로 예방할 수 있다고 한다.
빅데이터를 활용한 비즈니스 최적화는 공공, 민간 등 많은 분야에서 변화를 일으킬 것으로 예상되고 있다. 특히 업계 전문가들은 빅데이터의 활용으로 가장 큰 수혜를 입을 수 있는 산업으로 자동차 부문을 꼽는다. 이는 빅데이터를 통해 브랜드인지도 고객별 디지털 참여 수준, 다양한 자동차 처리 프로세스에 대한 응답시간, 취향에 따른 설정 등을 기준으로 삼아 다양한 고객 차별화 전략을 실행할 수 있기 때문이다. 또한 자동차에 접목된 각종 센서들로 인해 쌓이는 데이터를 효과적으로 처리하고 분석하기 위해선 빅데이터가 필수이기 때문이다. 센서나 카메라로부터 얻은 데이터를 비롯해 내비게이션, 위치정도 서비스는 물론 다양한 차량진단, 엔터테인먼트 등의 데이터가 주를 이루고 있다. 이미 독일의 주요 자동차 업체들은 무선통신회사 가입자들의 식별정보를 담은 심(SIM)을 내장하고 대용량 데이터를 처리하기 위한 시스템을 갖춘 모델을 출시하고 있는 상황이다.
V2I는 V2V 기능이 확대된 것으로 차량과 같은 장비를 갖춘 신호등, 도로표지판, 도로에 설치한 기기 등에서 다양한 데이터를 수집하고 분석해 교통체증, 제한속도, 교량 및 터널의 높이 제한 등이 포함돼 안전운전에 도움이 될 수 있다.
GM과 미시건 주는 자동차와 인프라 간 통신(V2I)기능을 탑재한 도로의 확대 계획을 공동으로 발표하였다. V2I는 각 자동차에 도로상황, 교통정보는 물론 빈 주차장과 포트홀의 위치까지 알려준다. 아직은 연구단계에 있지만 2017년에 200km에 달하는 ‘지능형 고속도로’가 건설될 예정이다.
ITS에서는 혼다를 포함한 몇 개의 회사들이 보행자와의 충돌을 막아주는 자동차와 보행자(V2P) 간 경고시스템을 선보였다. 보행자의 스마트폰이 발신기가 되어 자동차에 신호를 보내는 방식이다. 이 기술은 운전자가 도로를 횡단하고 있는 보행자나 어두운 곳에 있어 잘 보이지 않는 보행자를 충돌하지 않도록 도와준다.
V2X는 운전 중 도로인프라 및 다른 차량과 통신하면서 교통상황 등의 정보를 교환하거나 공유하는 기술(Vehicular Communication System)이다. 현재 진행되고 있는 스마트카 관련 사업은 대부분 특정자동차나 플랫폼업체가 단일차량을 대상으로 서비스하고 있어 도로의 실제 상황정보를 100% 반영하기는 불가능하다. 그러나 V2X 통신기반의 무선차량 네트워크를 활용하면 안전성과 효율성을 극대화할 수 있다. 이 기술을 상용화할 경우 자동차와 IT산업의 발전을 기대할 수 있고 사회적 비용도 최소화할 수 있다.

나. 무인 자동차 기술
무인(자율주행)자동차 시대 도래하였다. 무인자동차는 주변을 인식하는 레이저·카메라 기술, 정보처리 기술, 차체를 자동 제어하는 인공지능 등 전자기술이 핵심이다. 각종 모터쇼와 정보기술 박람회에서 다양한 무인자동차 모델이 전시되고 있으며 2013년 초 미국 라스베이거스 가전전시회(CES)에 아우디와 도요타가 무인차모델을 전시하였다. 무인자동차를 가장 먼저 현실로 끌어들인 건 자동차업체가 아닌 IT업계 강자 구글이다. 무인화는 소프트웨어가 좌우하므로 구글 등 IT업계의 새로운 승부처로 등장하였고 2010년 10월 시각장애인이 마트·패스트푸드점에서 물건을 사고 집에 오면서 주차하는 화면 등의 공개로 무인자동차의 시험주행 사실 발표하였다. 현재 시험주행거리가 48만㎞를 넘지만 무사고이며 운전자 아닌 차량으로 면허증 교부하는 것이 기존의 차량과 다르다.
2013년 9월 독일 프랑크푸르트 모터쇼에선 메르세데스 벤츠社는 무인차를 전시장 전면에 배치하였다. 벤츠社는 1986년 시운전에 성공했고 94년엔 파리에서 1,000㎞ 실제주행에 성공하였으며 모터쇼에 출품된 ‘S500 인텔리전트 드라이브’는 8월 독일 남서부에서 125년 전 세계 최초의 자동차(페이턴트 모터바겐)가 처음으로 장거리 운행을 했던 코스를 따라 100㎞를 무인주행을 하여 도심과 시외의 두 가지 교통조건에서 자율주행의 가능성을 증명하였으며 2020년 이전 양산차량에 자율주행 기능을 실현하는 첫 제조사라는 목표를 제시하였다.
일본의 닛산은 매사추세츠공대(MIT)와 스탠퍼드대, 옥스퍼드대, 도쿄대 등 다국적 연합군을 구성해 2020년 2개의 무인자동차 모델 개발 목표를 발표하였다. 미국의 정보업체 내비건트리서치는 2020년에 무인차가 8,000대 팔리고 매년 85%씩 성장해 2035년 전 세계 판매량 9,450만대(신차 판매의 75%)로 전망하였다.
현대·기아차는 무인차를 21세기 자동차 기술의 향방을 좌우할 핵심기술로 전망하고 K9에는 차 주변 360°를 보여주는 기능, 사각지대에 다른 차가 접근할 경우 운전자에게 경고하는 시스템 등을 장착하였고 최근 출시된 ‘더뉴 아반떼’는 자동 평행주차뿐 아니라 자동 직각주차가 가능한 기술 적용하였다.
무인자동차에 대한 부정적 전망은 1) 가격문제로 구글의 무인차 개발비용은 대당 1억5,000만원 이상으로 추정하며, 2) 운전자 욕구로 운전자의 직접 제어하고 싶어 하는 욕구를 완벽하게 대체할 수 있는 기술이 개발되어야 한다.
부정적인 요인의 가장 큰 문제점은 프로그램 해킹에 의한 제어 시스템 오작동, 사고 시 책임소재(제조사 or 탑승자)이다. 그리고 인프라와 기술력 그리고 보험, 교통법규 등 제반사항의 기술발전 여부가 무인차 시장의 성장 여부를 결정할 것이다.
다. 커넥티드 카의 해킹
자동차에 대한 해킹 침해사고가 공식적으로 보고된 바가 없었던 2010년 10월 타다요시 코노와 스테판 새비지 교수가 이끄는 워싱턴대학과 캘리포니아대학의 연구팀은 ‘최신 자동차들의 보안실험 분석’이라는 논문을 발표하였으며 이 논문에서 연구팀은 대부분의 해킹공격은 차량 내부 포트의 접속을 필요로 하지만 차량 제조업체들이 점점 더 많은 무선접속 기능을 추가함에 따라 차량시스템을 전면적으로 해킹하여 망가뜨리는 것이 점차 쉬어지고 있다고 지적하였다.
연구팀이 논문을 발표하기 전인 2009년 말, 연구팀은 블레인 워싱턴에 있는 폐쇄된 공항 활주로에서 테스트차량의 전자 브레이크 시스템을 해킹하여 운전자가 아무리 브레이크를 세게 밟아도 주행 중인 차를 정지시키지 못하게 하는 실험을 하였으며 또 다른 실험에서는 엔진을 정지시키고 속도계가 속도를 잘못 인식하도록 하였으며 차량의 앞, 뒤 브레이크가 고르게 작동하지 못하도록 하고 고속으로 주행하는 차량을 해킹으로 불안정하게 만들 수 있다는 실험을 시연하였다.
연구팀은 CarShark라는 해킹을 위한 인터페이스를 자체 개발하였으며 이는 일반적인 노트북 환경에서 구동 가능하며 스마트폰에서도 구동이 가능하다. 이 연구팀은 2011년 8월에 ‘자동차 해킹지점에 대한 실험적 분석’이라는 두 번째 논문을 발표하여 다시 한 번 차량 해킹의 위험성을 환기시켰다. 연구팀은 실험을 통해 PC의 웜 바이러스와 트로이목마가 자동차에도 옮겨지는 방법과 차량 진단시스템, 무선접속은 물론 심지어는 감염된 CD로도 라디오시스템을 통하여 바이러스가 차량시스템으로 옮겨진다는 것을 밝혔다. 그 외에 블루투스, 셀룰러 등에 의한 해킹의 위험성을 강조하였다. 그러나 세계 최대 자동차업체인 도요타는 해킹의 가능성을 부정하였고 혼다, 현대와 닛산, 폭스바겐 등등은 차량 내 컴퓨터 시스템에 대한 보안 연구를 하고 있다거나 논평을 유보하였다. 또한 자동차 제조와 운송 산업의 기업 보호를 지원하고 해킹을 유발할 수 있는 취약성들에 대한 조사를 담당하는 미국 국토보안국은 해커들의 차량에 대한 차량에 대한 공격 위험을 얼마나 심각하게 고려하고 있는지 여부에 대한 논평을 거부하였다.
보안전문가들은 이미 자동차를 바퀴달린 컴퓨터로 인식하고 있다. 차량은 전자제어 유닛(ECU)이라 불리는 수십 개의 작은 컴퓨터로 구성되어 있기 때문이다. 또한 최근 들어 차량들은 셀룰러, 와이파이, 블루투스 등 기술을 사용하여 커넥티드 카로 거듭나고 있는데 이는 차량들을 범죄적 해커들이 주로 사용하는 원격 공격에 취약하게 만드는 요인이다.
미국 IT전문매체 <와이어드(WIRED)>가 피아트 크라이슬러의 자율주행 SUV ‘지프 체로키’의 원격 해킹시연 영상을 공개한 것에 이어 미국의 해커 새미 캄가가 GM社의 커넥티드 카인 ‘쉐보레 볼트’를 해킹하는 영상을 공개하였다. 해킹 결과 원격으로 차량의 문을 여는 것은 물론이고 브레이크나 핸들조작까지 가능하기 때문에 사람의 목숨까지 위협하는 심각한 문제가 발생할 수 있다고 한다.
2015년 7월, 크라이슬러의 스포츠유틸리티차량(SUV) 지프 ‘체로키’가 미국 고속도로를 달리고 있었다. 운전자는 가만히 있는데 차에서 경적음이 울리더니 에어컨과 라디오가 켜졌다. 멀티미디어 화면에는 ‘차량 조종자’ 얼굴이 등장했다. 워셔액이 분사되더니 와이퍼가 움직여 운전자의 시야를 방해했다. 스티어링 휠이 제멋대로 움직이더니 가속페달도 말을 듣지 않아 속도가 절반으로 떨어졌다.
2015년 7월 21일 유튜브에 올라온 차량해킹 동영상은 자동차가 풀숲에 곤두박질치는 장면으로 끝났다. 7월 16일 FCA가 자사 홈페이지에 보안 소프트웨어 패치를 공개한지 5일 만에 올라온 동영상이었다. 전문해커인 찰리밀러와 크리스 밸러섹은 차량에서 약 16km 떨어진 곳에서 노트북으로 인포테인먼트 시스템 ‘유커넥트 라디오’를 통해 차량을 해킹했다.
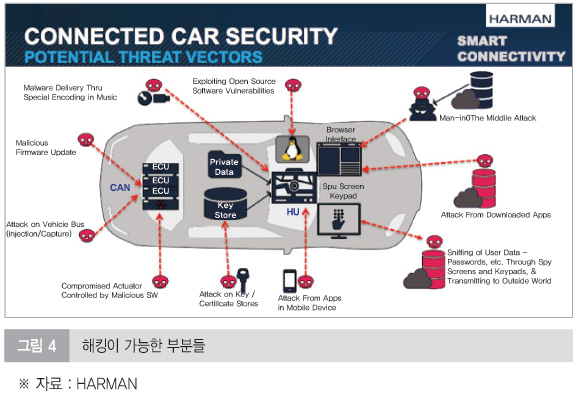
일련의 사건을 계기로 미국 고속도로교통안전국(NHTSA)은 인포테인먼트 시스템 보안 결함에 대한 조사에 착수했다. 미 상원의원 에드워드 마키와 리처드 블루먼솔은 NHTSA 감수 하에 기본 주행기능과 관련된 차량용 소프트웨어에 최소한의 보안시스템을 확보하도록 강제하는 내용의 법안을 도입하자고 제안했다. 그림 4는 자동차의 해킹이 기능한 부분들이다.
글로벌 완성차업체 간 ‘커넥티드 카(정보통신기술을 융합한 자동차)’ 개발경쟁이 치열해지면서 자동차 해킹 위협이 더욱 커지고 있다. 자동차 해킹은 운전자 생명을 위협하는 데다 자동차 업체에는 대량 리콜과 집단소송 등을 야기할 수 있다. 특히 완성차 업체들이 최근 인포테인먼트 시스템에 안드로이드와 같은 개방형 운영체제(OS)를 탑재하기 시작하면서 해커가 접근할 수 있는 경로는 더욱 다양해지고 있다.
해커 공격에 대비하기 위해 GM은 사이버보안을 담당하는 별도 팀을 꾸리고 미군, 보잉社와 협력해 해킹 방어시스템을 구축하고 있다. 도요타도 차량 내에서 해킹을 차단할 수 있는 보안
칩을 개발 중인 것으로 알려졌다.
커넥티드 카에는 무선 인터넷 연결이 가능한 텔레매틱스 시스템 사용을 위해 IP주소가 부여된다. 때문에 PC해킹과 마찬가지로 해킹으로 IP주소를 알아 어디서든지 차에 접속할 수 있는 취약점이 존재할 수밖에 없다. 기술의 개발과 보안문제에 대한 해결방안이 함께 제시되어야 진정한 기술의 발전이라고 할 수 있다. 또 하나의 스마트 디바이스를 표방하는 자동차 업계도 보안에 대한 철저한 준비가 필요하다. 테러 혹은 불특정 다수에 대한 폭력의 수단으로 차량 해킹을 악용하는 것이 현실에서 벌어질 수 있다는 사실에 대해 자동차업계뿐만 아니라 범국가적 차원의 대응 노력이 필요하다.
라. 차량 네트워크 보안
보안표준 마련 및 OS개발을 통해 글로벌 커넥티드 카 시장을 공략해야 한다. 2014년 2월 종료된 ‘카-헬스케어 보안기술 개발’ 연구과제에서는 실제 자동차를 이용한 해킹실험을 통해 CAN 통신의 취약점을 증명하고 이러한 위협으로부터 CAN 통신을 보호할 수 있는 암호화 및 인증기법을 설계했다(이동훈 고려대대학교 2014. 5. 6 TTA journal vol. 153 pp29-34). 미래창조과학부에서는 실제 자동차산업에 적용할 수 있는 보안기술을 개발하기 위해 융합보안 분야의 신규 국책연구과제(자동차 전장 ECU 간 보안전송기술 개발)를 진행하고 있다.
해외에서의 대표적인 자동차 보안 프로젝트로는 SEVECOM(SEcure VEhicle COMmunication), EVITA(E-safety Vehicle Intrusion Protected Applications), PRESERVE(Preparing Secure V2X Communication Systems) 등이 있다. SEVECOM 프로젝트는 지능형 자동차 네트워크에 대한 보안 위협을 정의하고 이를 위한 암호 프리미티브를 정의하고 있다. EVITA 프로젝트에서는 자동차 내부네트워크 보호를 위한 HSM(Hardware Security Module)를 개발하였다. PRESERVE 프로젝트는 유럽에서 진행되었던 다양한 자동차 보안 프로젝트들을 통합하고 있다.
마. 차세대 지능형 교통시스템
차세대 지능형 교통시스템(C-ITS)은 저가 통신기술의 확산 덕택으로 빠르게 성장하고 있다. 도로주행 중에 가장 많은 통신 협력은 차량 대 차량(V2V)과 차량 대 인프라(V2I) 시스템이 포함된다. C-ITS는 유럽연합 집행위원회에 의해 정의된 바와 같이 도로 교통관리를 위한 차세대 지능형 교통시스템은 ‘도로 오퍼레이터, 인프라, 차량, 운전자와 다른 도로 사용자가 최고 효율적이며 안전하고 편안한 여행을 할 수 있도록 서로 협력하는 시스템’으로 간주될 수 있다. 차량과 차량, 차량과 인프라 간의 협력시스템은 독립형 시스템이 달성할 수 있는 품질의 개선을 넘어서 이러한 목적에 기여할 것이다.
C-ITS는 차량이 주행 중 다른 차량 또는 도로에 설치된 인프라와 통신하면서 주변 교통상황과 급정거, 낙하물 등 위험정보를 실시간으로 확인 경고하여 교통사고를 예방하는 시스템이다.
차세대 지능형 교통시스템은 차량과 도로사정에 대한 여러 가지 정보를 도로 오퍼레이터에게 제공하여 도로망에서 위험을 감소시키는 목적을 가진다. 차량은 서로 또는 각각 도로환경 상태에 대하여 이용 가능한 정보로 인프라의 품질과 신뢰성을 높이는 통신을 할 수 있다. 스마트폰 기술, 차세대 ITS의 빠른 확산 때문에 차량의 데이터 수집에 그것들의 애플리케이션으로부터 큰 지원을 받을 수 있다. 바르게 설계되면 안전성과 편안한 이동성을 향상시킬 수 있고 차세대 ITS 장비의 비용을 감소시키며 모바일장치를 위한 특수한 애플리케이션은 사회적, 경제적 편익으로 이어질 수 있다.
모바일 응용프로그램은 사용자가 장치 자체에 내장된 GPS칩을 통해 위치, 가속도 및 속도와 같은 일련의 파라미터를 수집할 수 있게 허락한다. 게다가 컬러바를 통하여 사용자는 엄밀하게 GPS칩에 의해 획득된 가속도와 속도프로필의 추정과 서로 관련된 그들의 운전스타일을 지속적으로 빈번하게 모니터링 할 수 있다. 특히 네트워크의 특정한 중요지점에서 도로 오퍼레이터에 의해 만들어진 이러한 데이터의 분석과 관리(예를 들면 교차로, 사고다발지점, 작업지역), 잠재적으로 위험한 사용자 초기 거동을 확인하도록 허락하고 동시에 최고 운전습관을 취하는 사용자에게 보상한다.
SMaRTDRIVE app이 설치된 스마트폰을 가진 보행자는 그것의 법적 측면에 관계없이 부상자들에 대해 직접적으로 도움이 되는 응급구조 서비스에 대한 버튼 클릭의 권한으로 운행 중에 마주치는 도로사고, 위험 및 혼잡에 대해 알릴 수 있는 시스템이다. 이 시스템은 전통적인 사이렌을 사용하는 방법뿐만 아니라 구급차는 교통신호 등을 사전 조치하기 위해 무선통신을 사용할 수 있다. 그런 애플리케이션은 운행 전체에 걸쳐 사고 응급대응을 통해 위험을 감소시킬 수 있고 귀중한 시간의 절약을 용이하게 한다. 이와 관련해서 차량 네트워크에서 트래픽 관련 메시지를 전하는 VANET 기반 시스템으로 인도에서 개발되었다.
차량과 차량이 주변과 서로 소통하기 위해 차량 내에 설치된 전용 하드웨어를 이용하는 신규 스마트폰과 통합적인 안전주행 애플리케이션이다. 기존 솔루션과는 달리 소프트웨어는 차량 사이에 데이터 전송을 위해 선택한 Wi-Fi Direct 기술을 수행하기 위해 설계되었고 시스템은 차량탑재장치(OBU), 스마트폰에 안드로이드 앱, 서버와 노변기지국(RSUs)으로 구성되었다. OBU는 차량 안에 위치되고 RSU는 도로 교차점에 설치하도록 설계되었다.
자동차에서 무선으로 데이터를 교환하는 것은 자동차를 특히 ISM대역(Industrial Scientific Medical Band: 산업·과학·의료용 기기에서 정부로부터 별도의 사용허가 없이 사용할 수 있는 주파수 대역으로 현재 전 세계적으로 900MHz, 2.4GHz, 5.7GHz 대역에 공통 ISM 대역이 설정되어 있음)을 이용하는 기술에 대한 보안공격에 취약하게 할 수 있다.
바. 차량 탑재센서
차량 탑재센서를 이용할 수 있는 잠재적 서비스와 시스템은 센서의 애플리케이션 도메인에 따라 자동차에서 (1) 안전성, (2) 진단을 위한 센서, (3) 편의성을 위한 센서, (4) 환경 모니터링을 위한 센서로 분류한다. 거리 센서에는 두 가지 주요 종류가 있다. 장거리용 센서는 30-120m 사이의 모니터링 범위로 단지 앞쪽만 보인다. 이 범주에는 (1) 레이더센서 - 77GHz 대역에서 오퍼레이팅, (2) LIDARS(광 레이더)로 알려진 레이저 스캐너가 포함된다.
장거리용 센서를 이용하여 가능하게 된 애플리케이션의 예는 앞쪽으로 자동차의 속도를 탐지하고 자동차의 자체속도를 조절하기 위한 적응식 정속주행 시스템(ACC: 주행속도와 차간거리를 자동으로 제어하는 시스템)이다. 단거리용 센서는 모든 방향을 볼 수 있으나 모니터링 범위가 0-30m로 짧다. 그것에는 24GHz와 79GHz 대역에서 작동되는 레이더센서와 두 가지 다른 목적에 활용될 수 있는 카메라 비전 등이 있다. 초음파 센서는 평균 2.5m의 탐지범위를 가지고 있는 저가의 센서이며 용량성 근접센서는 그것에 직접 접촉 없이 대상의 인접성을 탐지한다. 그것은 공기와 다른 유전성질로 전도대상 또는 대상의 인접성을 감지하며 용량성 센서는 정확하게 2m까지 거리를 측정할 수 있다.
나이트비전 센서는 자동차 헤드라이트의 조명범위를 넘어서 앞쪽으로 도로와 길가의 전경을 봄으로써 운전자의 지각에 도움을 주는 목적으로 사용된다. 수동적 나이트비전 센서는 광원의 사용을 요구하지 않는 원적외선 시스템을 사용한다. 그 대신에 그것은 써모그래픽 카메라를 이용하는 대상에 의해 방출되는 기존 열방사를 포착하는 것에 의존한다. 위성위치 확인시스템(GPS)은 정보에 대한 자료의 예라고 생각할 수 있다. GPS 위성으로 가로막힌 것이 없는 가시선(지상의 두 지점 간에 존재하는 직접 자유공간 경로)에 있는 한 위치와 시간정보를 제공하는 위성기반 내비게이션 시스템이다. 이밖에 진단센서에는 연료레벨 측정센서, 가스조정센서, 스티어링 휠 토크를 측정하는 토크센서, 자동 디밍 반사경에 사용하는 이미지 센서, 빗방울과 와이퍼를 동작시키는 레인센서, 안개 방지 센서 등이 있으며 차량 탑재환경 모니터링을 위한 센서의 범주는 주위 환경과 상태의 모니터링을 담당한다. 그것은 도로 위의 위험에 대한 경보 ITS(Intelligent Transport System: 지능형 교통시스템) 서비스 또는 트래픽, 도로와 날씨상황에 대한 리포트 된 정보를 제공하는 것을 목표로 한다.
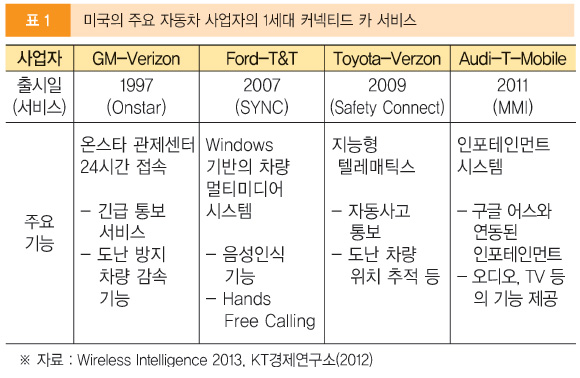
Connected Vehicle은 차량 내 정보 통합관리와 원격제어 및 차내에서 콘텐츠를 즐길 수 있는 지능자동차 즉 텔레매틱스, 인포테인먼트, 광대역 통신 네트워크 등을 결합한 신개념 차량이다. 표 1은 1세대 커넥티드 카의 자동차 제조업체별 서비스 내역이다.
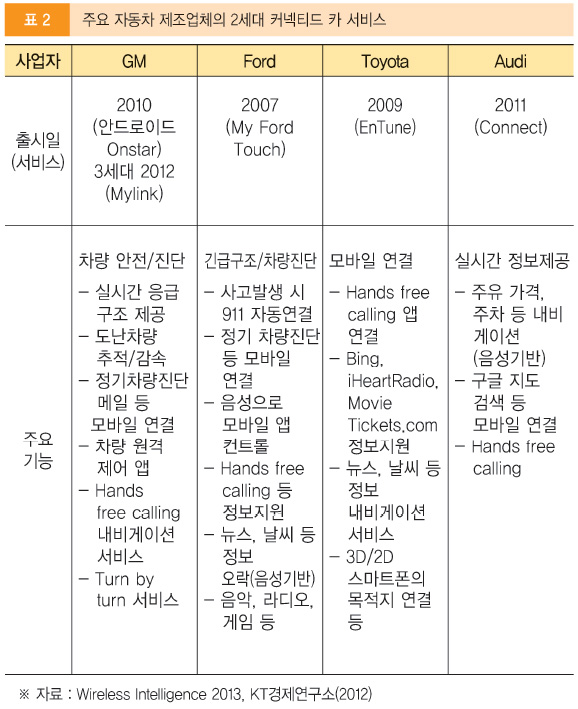
자동차가 스마트폰 앱과 연동되면서 인포테인먼트 서비스가 시작되었으며 자동차 제조사와 통신사의 협업이 등장하여 2세대 커넥티드 카 서비스가 시작되었다. 표 2는 주요 자동차 업체의 2세대 커넥티드 카 서비스이다.
인포테인먼트는 운전과 길 안내 등 필요한 정보를 뜻하는 ‘information’과 다양한 오락거리와 인간 친화적인 기능을 말하는 ‘Entertainment’의 통합시스템, 내비게이션, 오디오와 비디오 시스템이 이에 해당한다. 사용자 중심 서비스인 운전자와 동승자에게 차별적인 서비스를 제공하여 운전자의 운전을 방해하는 요소를 제공하고 동승자에게는 즐거움을 제공하는 Hot Spot, Mirror Link 서비스가 있다.
