부품 장착 장치의 제조비용 및 운용비용의 저감과 실장 시간의 단축이 가능하며, 또한 부품의 들뜸을 수정하는 것이 가능한 부품 장착 장치의 부품 실장 방법 및 부품 장착 장치를 제공한다. 소정의 순번으로 부품을 기판에 장착하는 부품 장착 장치의 부품 실장 방법에 있어서, 부품을 상기 기판의 소정의 제1 위치에 흡착 노즐 또는 메카 척으로 장착한 후, 부품 장착 스텝마다 그 장착한 부품의 소정의 제2 위치를 상기 흡착 노즐, 상기 메카 척, 또는 압입 부재로 압입하도록 하여, 부품의 들뜸을 수정한다.
본 발명은, 프린트 기판에 부품을 실장하는 부품 장착 장치의 부품 실장 방법 및 부품 장착 장치에 관한 것이다.
장치의 제조비용 및 운용비용의 저감과 실장 시간의 단축이 가능하며, 또한 부품의 들뜸을 수정하는 것이 가능한 부품 장착 장치의 부품 실장 방법 및 부품 장착 장치를 제공한다. 소정의 순번으로 부품을 기판에 장착하는 부품 장착 장치의 부품 실장 방법에 있어서, 부품을 상기 기판의 소정의 제1 위치에 흡착 노즐 또는 메카 척으로 장착한 후, 부품 장착 스텝마다 그 장착한 부품의 소정의 제2 위치를 상기 흡착 노즐, 상기 메카 척, 또는 압입 부재로 압입하도록 하여, 부품의 들뜸을 수정한다.
배경 기술
종래의 부품 실장 기술로서는, 특허 문헌 1(일본 특허 공개 제2002-176292호 공보)에 기재된 기술이 있다. 특허 문헌 1에서는 장착 위치 좌표의 부품 상면의 높이 위치를 장착한 후에 측정하고, 부품이 소정의 자세로 장착되어 있는지의 여부를 검지하고, 부품의 한쪽이 들뜨는 것을 검출하는 기술이 기재되고, 부품의 기울어짐이나 들뜸이 검출된 경우에는, 압입 보조 누름 동작에 의해, 그 부품을 떼어내지 않고 부품의 기울어짐이나 들뜸을 보정·해소하는 기술이 개시되어 있다.
발명의 내용
해결하려는 과제
특허 문헌 1에 기재된 바와 같은 종래 기술에서는, 프린트 기판에 장착한 부품의 들뜸을 검출하기 위한 계측 수단이 필요하기 때문에, 장치의 제조비용 및 운용비용이 높아질 우려가 있다. 또한, 한번 모든 부품의 장착을 끝내고 나서, 장착한 부품의 들뜸을 검출하고, 부품에 들뜸이 검출된 경우에, 압입 보조 수단에 의해 부품을 누르는 동작을 행하기 때문에, 실장 시간이 늘어나는 문제가 있었다. 또한, 장착하는 부품의 투영 면적(평면적)이 큰 경우나, 평면 형상이 특수한 형상(예를 들면, コ자 형상, 링 형상, 긴 형상 등)의 경우나, 부분적 혹은 전체적으로 굴곡지기 쉬운 부품 등의 경우에 대해서는, 대응이 어려웠다.
본 발명은, 상기 문제를 감안하여, 장치의 제조비용 및 운용비용의 저감, 및, 실장 시간의 단축이 가능하고, 또한 부품의 들뜸을 수정하는 것이 가능한 부품 장착 장치의 부품 실장 방법 및 부품 장착 장치를 제공하는 것을 목적으로 한다.
과제의 해결 수단
상기의 과제를 달성하기 위해, 본 발명의 부품 장착 장치의 부품 실장 방법은, 소정의 순번으로 부품을 기판에 장착하는 부품 장착 장치의 부품 실장 방법에 있어서, 부품을 상기 기판의 소정의 제1 위치에 흡착 노즐 또는 메카 척으로 장착한 후, 부품 장착 스텝마다 그 장착한 부품의 소정의 제2 위치를 상기 흡착 노즐, 상기 메카 척 또는 압입 부재로 압입하는 것이다.
또한 상기 발명의 부품 장착 장치의 부품 실장 방법은, 상기 제2 위치의 좌표를, 상기 제1 위치의 좌표로부터의 상대 위치 좌표에 의해서 정하는 것을 특징으로 한다. 또한 상기 발명의 부품 장착 장치의 부품 실장 방법은, 상기 제1 위치의 상기 좌표 및 상기 제2 위치의 상기 좌표는, X, Y, Z 및 θ좌표인 것을 특징으로 한다.
바람직하게는, 상기 발명의 부품 장착 장치의 부품 실장 방법에 있어서, 상기 기판의 상기 제2 위치의 바로 아래에는, 상기 부품의 핀이 삽입되는 핀 구멍이 있는 것을 특징으로 한다. 더 바람직하게는, 상기 발명의 부품 장착 장치의 부품 실장 방법은, 상기 부품을 상기 기판에 장착하는 순번과 상기 제1 위치가, 상기 부품 장착 스텝순으로 NC 데이터에 등록되고, 상기 제2 위치를 압입하는 복수의 위치와 순번이 상기 부품마다 부품 데이터에 등록되고, 상기 부품 장착 스텝마다 상기 흡착 노즐, 상기 메카 척 또는 상기 압입 부재로 상기 부품의 상기 제2 위치를 압입하는 경우에는, 상기 NC 데이터로부터 부품명을 읽어 들이고, 그 읽어진 부품명에 기초하여 상기 부품 데이터에 등록된 데이터에 기초하여 부품을 압입하는 것을 특징으로 한다.
또한 상기 발명의 부품 장착 장치는, 소정의 순번으로 부품을 기판에 장착하는 부품 장착 장치에 있어서, 부품을 흡착 또는 처킹한 상태에서 기판에 장착하는 흡착 노즐 또는 메카 척과, 상기 흡착 노즐 또는 메카 척을 부품을 장착하기 위한 제1 위치로 이동하여 장착하는 이동 장착 수단과, 상기 장착된 부품의 소정의 1 이상의 제2 위치를, 상기 이동 장착 수단이 상기 부품을 장착할 때마다, 흡착 노즐, 메카 척 또는 압입 부재로 압입하는 부품 압입 수단과, 부품 장착 장치의 동작을 제어하는 제어부를 구비한 것을 특징으로 한다.
또한 상기 발명의 부품 장착 장치는, 상기 제2 위치의 좌표를, 상기 제1 위치의 좌표로부터의 상대 위치 좌표에 의해서 정하는 것을 특징으로 한다. 또한, 상기 발명의 부품 장착 장치에 있어서, 상기 제어부에 있어서의 상기 제1 위치의 상기 좌표 및 상기 제2 위치의 상기 좌표는, X, Y, Z 및 θ좌표인 것을 특징으로 한다.
바람직하게는, 상기 발명의 부품 장착 장치에 있어서, 상기 기판의 상기 제2 위치의 바로 아래에는, 상기 부품의 핀이 삽입되는 핀 구멍이 있는 것이다. 더 바람직하게는, 상기 발명의 부품 장착 장치에 있어서, 상기 부품을 상기 기판에 장착하는 순번과 상기 제1 위치가 상기 부품 장착 스텝순으로 등록된 NC 데이터, 및 상기 제2 위치를 압입하는 복수의 위치와 순번이 상기 부품마다 등록된 부품 데이터가 기억된 기억부를 더 구비하고, 상기 제어부는, 상기 부품 장착 스텝마다 상기 흡착 노즐, 상기 메카 척 또는 상기 압입 부재로 상기 부품의 상기 제2 위치를 압입하는 경우에는, 상기 기억부로부터, 상기 NC 데이터의 부품명을 읽어 들이고, 그 읽어진 부품명에 기초하여 상기 부품 데이터에 등록된 데이터에 기초하여 부품을 압입하는 것을 특징으로 한다.
발명의 효과
본 발명에 따르면, 부품의 들뜸을 수정하는 것이 가능한 부품 장착 장치 및 부품 실장 방법을 제공하는 것이 가능하게 된다. 또한 부품 장착 장치의 제조비용 및 운용비용을 저감할 수 있어, 실장 시간을 단축할 수 있다.
발명을 실시하기 위한 구체적인 내용
이하에 본 발명의 일 실시 형태를, 그림들을 참조하여 설명한다. 또한, 이하에 설명하는 실시 형태는 설명을 위한 것이며, 본원 발명의 범위를 제한하는 것은 아니다. 따라서 당업자이면 이들의 각 요소 혹은 전체 요소를 이것과 균등한 것으로 치환한 실시 형태를 채용하는 것이 가능하며, 이들의 실시 형태도 본원 발명의 범위에 포함된다.
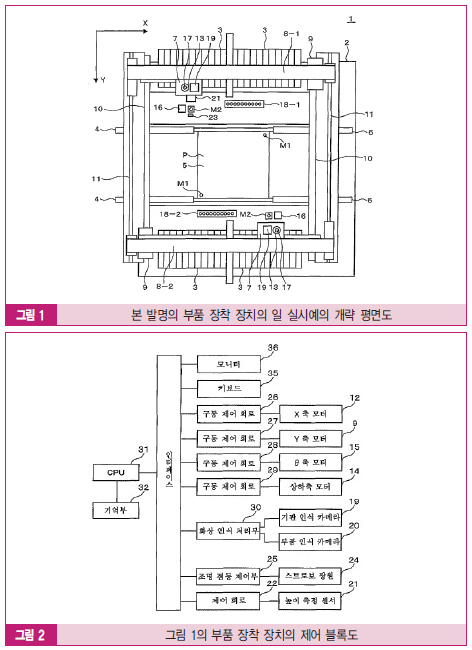
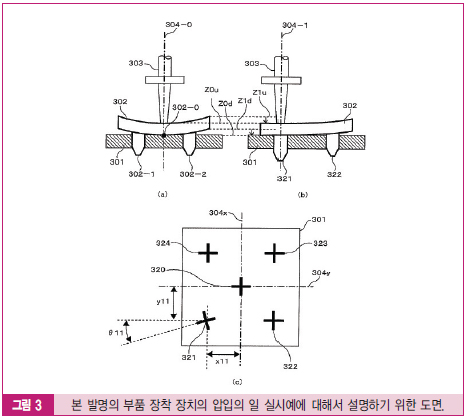
그림 1은 본 발명의 부품 장착 장치의 일 실시예의 개략 평면도이다. 또한 그림 2는 그림 1의 부품 장착 장치(1)의 제어 블록도이다. 그림 2에서는 편의상, X축 모터(12), Y축 모터(9), θ축 모터(15) 및 상하축 모터(14) 등은 각 1개만 도시하고 있다. 또한, 그림 1에서는, 그림 2의 제어 블록도가 도시하는 구성 요소를 대부분 생략하고 있지만, 인터페이스(34)에 의해서 부품 장착 장치(1)의 각 구성 요소와 결합하고 있다. 또한 인터페이스(34)는 외부의 호스트 컴퓨터 등 상위의 제어 장치에도 결합하고, 데이터나 신호의 송수신을 행하고 있다.
부품 장착 장치(1)의 장치 본체(2) 상에는, 여러 가지의 부품을 공급하는 부품 공급 유닛(3)이, 복수 병설되어 있다. 병설되어 대향하는 부품 공급 유닛(3)군의 사이에는, 공급 컨베이어(4), 위치 결정부(5) 및 배출 컨베이어(6)가 설치되어 있다. 공급 컨베이어(4)는 상류로부터 받은 기판(P)을 위치 결정부(5)에 반입한다. 기판(P)은, 위치 결정부(5)에서 도시하지 않은 위치 결정 기구에 의해 위치 결정되고, 부품이 장착된 후, 배출 컨베이어(6)에 의해서 반출된다.
부품 공급 유닛(3)의 각각에는, 소정의 부품이 수납되고 있고, CPU(Central Processing Unit)(31) 등은, 그 수납 위치를 나타내는 배치 번호 등에 의해서 인식이 가능하다. 부품 공급 유닛(3)은, 그 부품 취출부(부품 흡착위치)에 1개씩, 각각의 부품을 공급하고, 흡착 노즐(17)이, 장착 데이터에 의해 지정된 부품을, 부품 흡착 위치에서 흡착하여 취출해 간다.
X방향으로 긴 빔(8-1, 8-2)은, 대향하여 한 쌍의 빔(8)을 형성하고 있고, 각각, Y축 모터(9)의 구동에 의해 나사축(10)을 회전시켜, 좌우 한 쌍의 가이드(11)를 따라서 기판(P)이나 부품 공급 유닛(3)의 부품 흡착 위치 상방을 개별로 Y방향으로 이동한다. 빔(8-1, 8-2) 각각에는, 그 길이 방향, 즉 X방향으로 X축 모터(12)에 의해, 도시하지 않은 가이드를 따라서 이동하는 가동 헤드(7)가 각각 설치되어 있다.
가동 헤드(7)는, 흡착 노즐(17)을 구비한 장착 헤드(13)를 상하(Z축) 방향으로 이동시키기 위한 상하축 모터(14)와 연직축(Z축) 주위로 회전시키기 위한 θ축 모터(15)를 탑재하고 있다. 따라서 2개의 장착 헤드(13)의 각 흡착 노즐(17)은 X방향 및 Y방향으로 이동 가능하고, 수직선 주위(각θ)로 회전 가능하며, 또한 상하 이동(Z축 방향 이동) 가능하게 되어 있다.
부품 위치 인식부(16)는, 광원(스트로보 광원)(24a)과 광 파이버 케이블(24b)과 링 라이트 조명부(24c)로 이루어지는 조명용의 스트로보 발광부(24), 및, 부품 인식 카메라(20)로 구성되어 있다. 부품 위치 인식부(16)는, 각 흡착 노즐(17)에 대응하여 각각 1식(式) 설치되고, 부품이 XY방향과 노즐축에 대한 회전의 편차량이 얼마만큼 발생하여 흡착 유지되어 있는지를 인식하기 위해 부품(A)을 하방으로부터 촬상한다. 노즐 스토커(18-1, 18-2)는, 여러 가지의 흡착 노즐을 복수개 수납하고 있다.
기판 인식 카메라(19)는, 2개의 가동 헤드(7)에 각각 설치되고, 기판(P)에 부착된 마크(M1)의 위치를 인식하기 위해 마크(M1)의 근방의 기판(P) 표면을 상방으로부터 촬상한다. 또한, 부품 장착 장치(1)의 장치 본체(2)에 마크 형성체(M2)를 설치하고, 이 마크 형성체(M2)를 기판 인식 카메라(19)로 촬상 가능하게 하고 있다. 또한, 마크(M1)는, 기판(P)에 의해서 위치, 사이즈 혹은 패턴이 다른 경우가 있다.
한편, 부품 인식 카메라(20)의 관측 광학축과 마크 형성체(M2)의 중심축은, X방향으로 거의 동일한 위치에 배치되고, 실제의 부착 위치가 미리 계측 및 교정되고, 기지의 데이터로서 기억부(32) 내에 보존되어 있다. 또한, 흡착 노즐(17)의 축 중심과 기판 인식 카메라(19)의 관측 광학축은, XY방향에서 부품 인식 카메라(20)의 관측 광학축과 마크 형성체(M2)의 중심축과 거의 동일한 위치에 배치되고 있다. 또한, 도시하지 않지만, 기판 인식 카메라(19) 및 부품 인식 카메라(20)는, 각각, 초점 위치를 조절하기 위한 합초점 기구를 구비하고 있다.
다음으로, 그림 2에 도시한 제어 블록 구성과 기본적 동작을 개략 설명한다. 부품 장착 장치(1)의 제어 장치는, 부품 장착 장치(1)의 구성 요소와 인터페이스(34) 등을 통하여 서로 액세스하여 부품 장착에 관한 동작을 통괄 제어하는 제어부로서의 CPU(31) 및 기억부(32) 등으로 구성되어 있다. 기억부(32)에는, 부품의 장착 순서마다 기판(P) 내에서의 X방향, Y방향, 상하(Z)방향, 및 각도 위치(θ회전각) 정보나, 각 부품 공급 유닛(3)의 배치 번호 정보 등으로 이루어지는 장착 데이터나 기판(P)에 부착된 마크 M1의 위치 등의 각 기종마다의 프로그램 데이터가 보존되어 있다. 그리고 CPU(31)는, 기억부(32)에 보존된 프로그램에 따라, 부품 장착 장치(1)의 부품 장착 동작에 관한 동작을 통괄 제어한다. 즉, CPU(31)는, 구동 제어 회로(26)를 통하여 X축 모터(12)의 구동을, 구동 제어 회로(27)를 통하여 Y축 모터(9)의 구동을, 또한 구동 제어 회로(28)를 통하여 θ축 모터(15)의 구동을 제어하고, 또한 구동 제어 회로(29)를 통하여 상하축(Z축) 모터(14)의 구동을 제어하고 있다.
기억부(32)는, 하드디스크 등의 불휘발성 메모리이다. 기억부(32)에는, 예를 들면, 등록된 기종명이나 프로그램명 등에 대응지어 NC 데이터 및 부품 데이터가 기억되어 있다. CPU(31)는, 기종 절환의 조작이 행해졌을 때에는, 대응하는 기종에 대응하는 NC 데이터, 부품 데이터에 기초하여 부품 장착 동작을 실행한다. 또한, 부품 장착 장치에 있어서, 화상 인식 처리부(30)는, 인터페이스(34)를 통하여 CPU(31)에 결합하고 있다.
CPU(31)가 주국, 화상 인식 처리부(30)가 종국 의 관계에 있다. 즉, CPU(31)는, 기판 인식 카메라(19) 및 부품 인식 카메라(20)의 촬상 동작을 제어하고, 촬상한 화상을 인식처리(위치 편차량의 산출 등)하도록, 화상 인식 처리부(30)에 제어 신호를 출력하고, 그들의 인식 처리 결과를 수취한다. 반대로, 화상 인식 처리부(30)는, CPU(31)로부터 지시된 처리를 실행하여, 그 처리 결과를 CPU(31)에 출력한다. 예를 들면, 화상 인식 처리부(30)는, 기판 인식 카메라(19)에 제어 신호를 출력하고, 기판(P) 상의 마크(M1)의 화상과 전술한 부품 장착 장치(1)의 장치 본체(2) 상의 마크 형성체(M2)를 촬상하도록 지시한다. 기판 인식 카메라(19)는, 기판(P) 상의 마크(M1)의 화상과 전술한 부품 장착 장치(1)의 장치 본체(2) 상의 마크 형성체(M2)를 촬상하고, 촬상한 화상을 화상 인식 처리부(30)에 출력한다.
또한 예를 들면, 화상 인식 처리부(30)는, 부품 인식 카메라(20)에 제어 신호를 출력하고, 흡착 노즐(17)이 흡착하고 있는 부품(A)을 촬상하도록 지시한다. 부품 인식 카메라(20)는, 흡착하고 있는 부품(A)을 촬상하고, 촬상한 화상을 화상 인식 처리부(30)에 출력한다.
화상 인식 처리부(30)는, 기판 인식 카메라(19)가 촬상한 마크(M1)의 화상으로부터, 기판(P)의 XY방향의 위치 편차량이나 회전 편차량을 산출한다. 또한, 화상 인식 처리부(30)는, 마크 형성체(M2)의 화상으로부터, 부품 인식 카메라(20)의 광축에 대한 기판 인식 카메라(19)의 광축의 상대적 위치 편차량을 산출한다. 또한 화상 인식 처리부(30)는, 부품 인식 카메라(20)가 촬상한 부품(A)의 화상으로부터, 부품(A)의 XY방향의 위치 편차량이나 회전 편차량을 화상 인식 처리부(30)에 의해서 산출한다.
상술한 바와 같이, 인식 처리부(30)는, 인식 처리에 의해 이들의 위치 편차량을 파악하고, 그 결과를 CPU(31)에 출력한다. CPU(31)는 입력된 결과로부터 보정해야 할 정보를 도출하고, 도출한 보정 정보에 기초하여, 실제의 프린트 기판(P) 상의 실장해야 할 위치에 부품을 장착하기 위해 대응하는 구성 요소에 지시를 낸다. 예를 들면, CPU(31)는, 구동 제어 회로(27)에 제어 신호를 출력하고, 구동 제어 회로(27)는, 그 제어 신호에 기초하여 Y축 모터(9)를 제어하여, 빔(8)(빔(8-1) 혹은 빔(8-2))을 Y방향으로 이동시킨다. 이에 의해서 Y방향의 위치 보정이 이루어진다.
또한 예를 들면, CPU(31)는, 구동 제어 회로(26)에 제어 신호를 출력하고, 구동 제어 회로(26)는, 그 제어 신호에 기초하여 X축 모터(12)를 제어하여, 가동 헤드(7)를 X방향으로 이동시킨다. 이에 의해서 X방향의 위치 보정이 이루어진다. 또한 예를 들면, CPU(31)는, 구동 제어 회로(28)에 제어 신호를 출력하고, 구동 제어 회로(28)는, 그 제어 신호에 기초하여 θ축 모터(15)를 제어하여, 가동 헤드(7)를 θ회전시킨다. 이에 의해서, 연직 축선 주위로의 회전 각도 위치의 보정이 이루어진다.
또한, 상술한 것 중 기판 인식 처리 동작은, 각각의 빔(8-1, 8-2)에 의한 최초의 부품 장착 전에 한하여 실행된다. 그것은, 프린트 기판(P)의 특성뿐만 아니라, 각 빔, 각 장착 헤드(13) 등의 특성을 부품 장착의 위치 보정에 반영하기 위함이다.
또한, 그림 2에 있어서, 입력 장치(35)는, 부품 장착 장치(1)의 외부로부터, 작업원이 입력 조작하는 키보드나 포인팅 디바이스 등의 UI(User Interface)이며(바람직하게는, GUI 조작 가능), 모니터(36)는, 부품 장착 장치(1) 내에 조립된 각종의 장착 데이터(NC 데이터 및 부품 데이터), 실장 조건 데이터, 또는 인식 부품 화상의 입력 화상 혹은 처리 결과 등을 표시한다.
또한, 그림 1, 그림 2의 실시예에서는, 부품 공급 유닛(3)의 부품 흡착 위치로부터 부품을 취출하여 기판(P)에 장착하기 위해(부품의 유지를 위해), 흡착 노즐(17)을 사용하고 있다. 그러나 흡착 노즐로 부품을 흡착할 필요는 없으며, 메카 척을 사용하여 부품을 척킹하도록 하여도 되는 것은 물론이다.
그림 3은, 본 발명의 일 실시예를 설명하기 위한 도면이다. 그림 3의 (a)는, 기판(301)에 부품(302)을 장착하였을 때의 부분 단면도이다. 그림 3의 (b)는, 부품(302)이 장착된 기판(301)에 더 압입을 행하였을 때의 단면도이다. 그림 3의 (c)는, 부품(302)의 핀(302-1∼302-4)의 중심부의 위치(321∼324)를 설명하기 위한 평면도이다.
우선, 그림 3의 (a)와 같이, 일반적으로 주지의 기술에 의해, 부품(302)을 기판(302)에 흡착 노즐(303)에 의해서 장착한다. 이 때, 흡착 노즐(303)의 중심선(304)이, 미리 NC 데이터(후술)에 등록된 부품 장착 위치에, 장착헤드(흡착 노즐(303))가 이동하여 부품(302)을 기판(301)에 장착한다. 이 경우, 흡착 노즐(303)의 중심선(304-0) 바로 아래의, 부품(302)과 기판(301)은, XYZ좌표(수평 위치 좌표 및 수직 위치(높이) 좌표)의 위치(302-0)에서 접촉한다. 그러나 부품(302)의 끝면으로 가면 갈수록, 기판(301)에 대하여, 부품(302)의 기울어짐이나 들뜸이 커진다. 특히, 부품의 투영 면적(평면적)이 큰 경우나, 평면 형상이 コ자 형상, 링 형상, 긴 형상 등의 특수한 형상의 경우나, 부분적 혹은 전체적으로 굴곡지기 쉬운 부품 등의 경우에 부품(302)의 기울어짐이나 들뜸이 커진다. 따라서 그림 3의 (b), 그림 3의 (c)에 도시한 바와 같이, 부품(302) 장착 후, 부품(302)의 하면에 예를 들면 4개소 형성된 핀(302-1∼302-4)의 위치(321∼324)에 대해서 각각, 흡착 노즐(303)을 압입하고, 부품(302)을 각각의 지점(핀 구멍의 위치(321∼324))에서 기판(301)에 압입한다. 이 결과, 중심선(304-1)에 있어서, 부품(302)의 높이를, 높이 Z1d로부터 높이 Z0d로 수정할 수 있고, 높이 Z1u로부터 높이 Z0u로 수정할 수 있다.
흡착 노즐(303)의 압입 동작은, 그림 3의 (c)에 도시한 바와 같이, 핀마다(핀 구멍의 위치(321∼324)) 각각에서 실행되고, 압입을 위한 위치 좌표는, 장착할 때의 부품 장착 위치로부터의 상대 위치 좌표이다. 예를 들면, 그림 3의 (c)의 핀(321)에서는, X좌표는 부품 장착 위치(320)로부터 x11(예를 들면, 도면 하(下)방향이 플러스 좌표, 상방향이 마이너스 좌표) 떨어진 장소, Y좌표는 부품 장착 위치(320)로부터 y11(예를 들면, 도면 우방향이 플러스 좌표, 좌방향이 마이너스 좌표) 떨어진 장소가, 압입의 좌표이다.
또한, 사용하는 흡착 노즐(303)의 접촉면 형상이, 정원(正円)이 아닌 경우에는, 압입에 적응한 각도 θ11로 흡착 노즐(303)(장착 헤드)을 회전시킨다. 또한, 304x는 기판면의 수평(X) 방향, 304y는 기판면의 수직(Y) 방향이다.
또한, 압입 동작에 사용하는 흡착 노즐은, 부품 장착시에 사용한 흡착 노즐이어도 되고, 다른 흡착 노즐로 변환하여 실행하도록 하여도 된다. 또한, 압입 전용의 압입 부재를 장착 헤드에 설치하여도 된다. 또한, 부품의 유지를 위해 흡착 노즐이 아니라, 메카 척을 사용한 경우에는, 부품을 압입하기 위해, 압입에 적응한 각도로 장착 헤드를 회전시키는(예를 들면, 장착시와 압입시에서 각도를 90° 변경) 것은 물론이다. 또한 압입시에, 메카 척의 어느 부위를 부품에 압박할지는, 임의로 정할 수 있다.
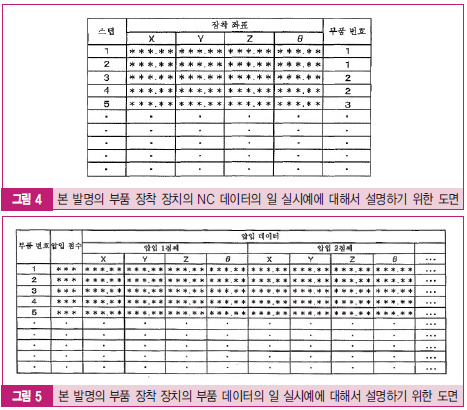
그림 4에 의해서, 본 발명의 부품 장착 장치의 NC 데이터의 일 실시예에 대해서 설명한다. 그림 4는 본 발명에 사용하는 부품 장착용의 NC 데이터의 등록 리스트의 일 실시예이다. 그림 4에 있어서, 부품(302)을 장착하는 순번이, 스텝 1∼5, …이다. 또한 장착순을 나타내는 각 스텝마다, 장착 위치 좌표 X, Y, Z, θ의 데이터 및 장착하는 부품의 부품 번호가 등록되어 있다.
그림 5에 의해서, 본 발명의 부품 장착 장치의 부품 데이터의 일 실시예에 대해서 설명한다. 그림 5는 본 발명에 사용하는 부품 장착용의 부품 데이터의 등록 리스트의 일 실시예이다. 그림 5에 있어서, 장착하는 각 부품마다, 대응하는 부품 번호(그림 4 참조)가, 1∼5, …이 리스트 업되고, 그 부품 번호마다, 압입 점수(압입하는 위치의 수)와 압입 데이터가 등록되어 있다. 압입 데이터는, 부품의 장착 좌표를 기준으로 하여 산출할 수 있는 좌표 값이며, 통상, 부품 장착시의 노즐 위치로 하는 부품 위치와 동일하다. 압입 데이터는, 압입 동작하는 순번으로, 소정의 제2 위치인 1점째, 2점째, …으로 등록한다.
또한, 흡착 노즐의 압입량을, 각 압입점에서 변경하는 것도 가능하다. 또한, 그림 5의 부품 데이터에서는 도시하고 있지 않지만, 이미 설명한 바와 같이, 압입 동작에 사용하는 흡착 노즐은, 부품 장착시에 사용한 흡착 노즐이어도 되고, 다른 흡착 노즐로 교환하여 실행하도록 하여도 된다. 또한, 부품 데이터를 NC 데이터와 별도로 작성하여 운용할 필요는 없고, NC 데이터에 압입용의 데이터로서 추가하여도 되는 것은 물론이다.
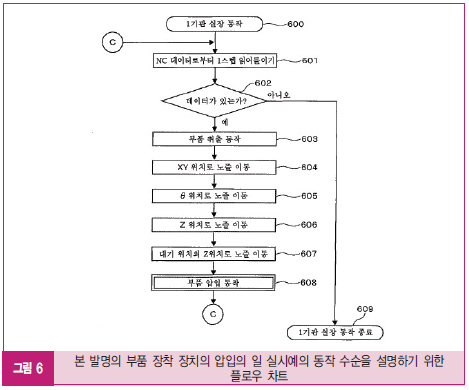
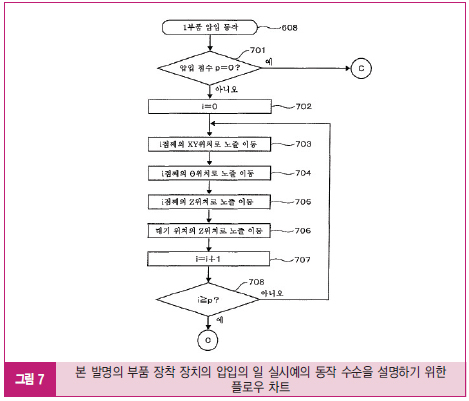
그림 6과 그림 7에 의해서, 본 발명의 부품 장착 장치의 일 실시예의 동작 수순에 대해서 설명한다. 그림 6은 본 발명의 부품 장착 장치의 기판 압입 동작을 포함시킨 부품 실장 수순의 일 실시예를 설명하는 플로우 차트이다.
그림 7은 본 발명의 부품 장착 장치의 실장 수순 중의 기판 압입 동작 수순의 일 실시예를 설명하는 플로우 차트이다. 이들의 플로우 차트는, CPU(그림 2 참조)가 부품 장착 장치를 제어하여 실행한다. 또한, 본 명세서에서는 부품을 장착하는 동작을 「장착」 동작으로 하고, 부품을 압입하는 동작을 「압입」 동작으로 하고, 「장착」 동작과 「압입」 동작을 합친 동작을 「실장」 동작으로 하여 설명한다.
그림 6에 있어서, 수순 600에서는, 1매의 기판의 실장 동작을 개시한다. 수순 601에서는, NC 데이터로부터 1스텝분의 데이터를 읽어 들인다. 수순 602에서는, NC 데이터에 상기 스텝의 실장 데이터가 존재하는지의 여부를 판정한다. 데이터가 존재하지 않는 경우에는, 부품 실장 수순 600을 종료(수순 609)하고, 데이터가 존재하는 경우에는 수순 603으로 진행한다. 이하, 데이터에 따라서 이하의 수순 603∼수순 608까지 실행한다. 또한, 수순 603∼수순 608에서의 흡착 노즐의 흡착 온 오프 동작 등의 상세한 동작에 대해서는, 주지이므로 설명을 생략한다.
수순 603에서는, 흡착 노즐은 부품 취출 동작을 행한다. 수순 604에서는, 부품을 흡착한 흡착 노즐을 읽어들인 스텝의 장착 좌표 XY위치로 이동한다. 또한, 예를 들면, Z위치는, 대기 위치 좌표와 동일하다. 수순 605에서는, XY위치의 이동을 종료한 흡착 노즐을 읽어 들인 스텝의 장착 좌표 θ위치로 회전한다. 수순 606에서는, 흡착 노즐을 읽어 들인 스텝의 장착 좌표 Z위치로 이동한다. 이 동작에 의해 상기 부품의 장착이 종료된다.
수순 607에서는, 대기 위치의 Z위치로 흡착 노즐을 이동한다. 수순 608에서는, 그림 7에 설명한 플로우 차트에 따라서 부품 압입 동작을 실행하고, 수순 601로 되돌아간다(흡착 노즐은 흡착 오프 상태).
그림 7에 있어서, 수순 608에서는, 1개의 부품의 압입 동작을 개시한다.
수순 701에서는, 부품 데이터로부터, 상기 부품의 압입 점수 p를 읽어 들이고, p=0인지의 여부를 판정한다. p=0이면, 이 부품에 대해서는 압입 동작이 없는 것을 의미하므로, 수순을 그림 6의 수순 601로 되돌린다. p≠0이면 수순 702로 진행한다. 수순 702에서는, 카운터 값 i를, i=0으로 하고, 수순 703으로 진행한다. 수순 703에서는, 읽어 들인 부품 데이터의 압입 i점째의 XY위치로 흡착 노즐을 이동한다. 수순 704에서는, 읽어 들인 부품 데이터의 압입 i점째의 θ위치로 흡착 노즐을 회전한다. 수순 705에서는, 읽어 들인 부품 데이터의 압입 i점째의 Z위치로 흡착 노즐을 이동(하강)한다.
수순 706에서는, 대기 위치의 Z위치로 흡착 노즐을 이동한다. 수순 707에서는, 카운터 값 i를 1 증가하여(i=i+1), 수순 708로 진행한다. 수순 708에서는, 카운터 값 i와 압입 점수 p를 비교하고, 카운터 값 i가 압입 점수 p와 동등하거나 혹은 큰지의 여부를 판정한다. i<p이면 수순 703으로 되돌아가고, i≥p이면 그 1개의 부품의 압입 동작을 종료하였으므로, 그림 6의 수순 601로 되돌아간다.
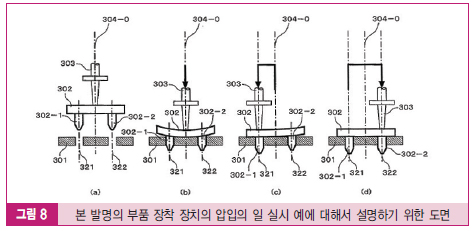
그림 6과 그림 7의 플로우 차트에서 실행하는 수순의 개략을 그림 8의 모식도로 더 설명한다. 그림 8은, 본 발명의 부품 장착 장치의 일 실시예의 부품 실장 동작을 설명하기 위한 도면이다. 그림 8의 (a)는, 그림 6에 있어서의 수순 605가 실행된 상태를 나타내는 부분 단면도이다. 그림 8의 (b)는, 그림 6에 있어서의 수순 606이 실행된 상태를 나타내는 부분 단면도이다. 그림 8의 (c)는, 그림 7에 있어서, 1점째의 지점(i=1)에서 수순 705가 실행된 상태를 나타내는 부분 단면도이다. 또한 그림 8의 (d)는, 그림 7에 있어서, 2점째의 지점(i=1)에서 수순 705가 실행된 상태를 나타내는 부분 단면도이다.
그림 8의 (a)에 있어서, 부품 302를 흡착하여 유지한 흡착 노즐(303)은, 흡착 노즐(303)의 중심선(304-0)의 위치와 미리 NC 데이터(도 4 참조)에 등록된 부품 장착 위치가 일치하도록, 흡착 노즐(303)이 X방향, Y방향, θ방향으로 이동하고 있다. 즉, 이 때, 흡착 노즐(303)의 중심선(304-0)은, 부품(302)의 NC 데이터의 장착 좌표(X, Y)의 장착 위치에 있고, Z좌표는 부품 장착 전의 높이(일반적으로, 기판마다 공통된 높이)에 있다. 또한, 부품(302)의 핀(302-1∼302-2)의 위치는, 기판(301)의 해당하는 위치(321∼322)에 거의 일치한다.
그림 8의 (b)에 있어서는, 그림 8의 (a)의 상태로부터 흡착 노즐(303)이 Z축 방향을 아래로 이동하여, 부품(302)을 기판(301)에 압박한다. 이 때, 부품(302)의 핀(302-1∼302-2)이, 기판(301)의 해당하는 위치(321∼322)에 장착된다. 그러나 흡착 노즐(303)은, 부품 중앙부(중심선(304-0))를 누르고 있다. 이 때문에, 그 이외의 부분에는, 노즐(303)로부터 직접 가압되어 있지 않다. 따라서 부품(302)의 끝면으로 가면 갈수록, 기판(301)에 대하여, 부품(302)의 기울어짐이나 들뜸이 커진다. 그림 8의 (b)에서는, 양끝이 들떠, 부품(302)의 핀(302-1∼302-2)이 위치(321∼322)에 충분히 삽입되어 있지 않다. 따라서 본 발명의 부품 장착 장치의 부품 실장 동작의 일 실시예에 있어서는, 그림 8의 (c)∼그림 8의 (d)와 같이 부품(302)의 핀(302-1∼302-2)의 상부로부터 하방으로 흡착 노즐(303)을 강하함으로써, 부품(302)과 기판(301)을 압박하여, 기판(301)과 부품(302)을 밀착시킨다. 또한, 흡착 노즐(303)의 이동 높이(Z좌표 값)는, 부품 데이터(그림 5 참조)에 등록되어 있다. 즉, 그림 8의 (c)에 도시한 바와 같이, 흡착 노즐(303)을 강하(Z방향으로 이동)하여, 부품(302)을 중심선(302-1) 축상에서 압입한다(부품 데이터의 압입 1점째의 데이터). 이하 마찬가지로, 부품 데이터의 압입 2점째의 데이터(그림 8의 (d)), …을 계속해서 압입한다.







